[拼音]:zhongliyi
[外文]:gravimeter
测定重力加速度的仪器。重力仪有绝对重力仪和相对重力仪两类。前一类用来测定一点的绝对重力值,后一类用来测定两点的重力差。重力仪广泛应用于地球重力场的测量,固体潮观测,地壳形变观测,以及重力勘探等项工作中。
绝对重力仪
工作原理有两种:
(1)自由下落原理
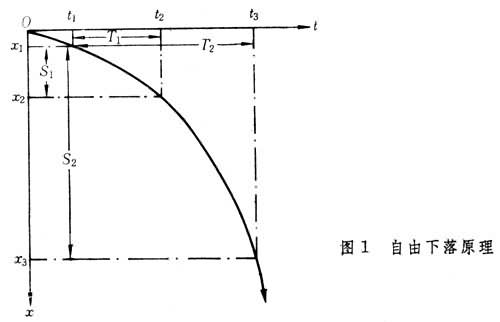
设一物体在真空中自由下落,运动过程中时间和行程的关系如图1所示。落体的重心在 t1、t2和t3时刻所在的空间位置分别为x1、x2和x3。若以 T2=t3-t1和T1=t2-t1表示两个时间间隔,以S2=x3-x1和S1=x2-x1表示相应的两段在垂线方向上的距离,则可用下列公式求得绝对重力值:
距离S2和S1可用稳定的激光波长测定,时间间隔T2和T2用高精度的频标信号测定。测量中还必须对各种影响测量精度的干扰因素进行计算和检测,然后对它们进行改正,才能获得最后测量结果。
(2)对称自由运动原理
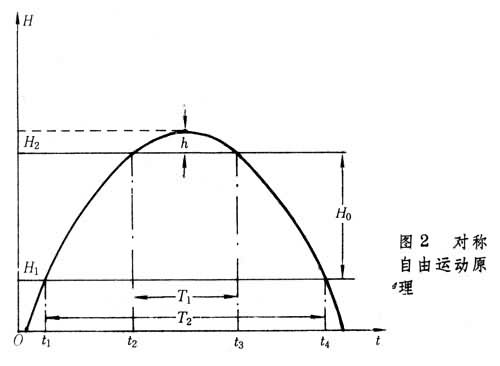
设一物体在真空中被垂直上抛,到达顶点D后,沿上升轨道垂直下落,运动过程中的时间和高度关系如图2所示。H1和H2分别为两个在垂线方向上的预定位置。物体的重心在上升阶段通过这两个位置的时刻分别为t1和t2,在下落阶段通过H2和H1两位置的时刻分别为t3和t4。若以 T2=t4-t1,T1=t3-t2表示两个时间间隔,以H0代表空间两位置之间的距离,则可用下列公式求得绝对重力值:

距离和时间间隔的测定方法类似于自由下落原理的测量方法。
20世纪 60年代,美国的法勒 (J.Faller)和哈蒙德(J. Hammond)首先直接应用激光干涉仪器测量绝对重力值。随后日本、意大利、苏联、法国等国家先后研制成功这类激光绝对重力仪。中国于1980年按自由下落原理也试制成功激光绝对重力仪,其测量精度在±16微伽左右。
相对重力仪
可分为静重力仪(又称稳定型重力仪)和助动型重力仪(又称不稳定型重力仪)。
静重力仪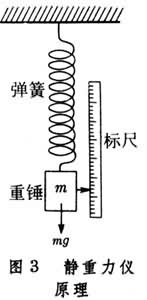
工作原理类似于一个机械弹簧秤(图3)。当作用在重锤上的重力g变化Δg时,弹簧的长度随之变化Δl,这时重锤也位移Δl的距离。在两个测点上重力的作用下,垂锤的静力平衡方程分别为:
mg=klm(g+Δg)=K(l+Δl),
式中m为重锤质量,k为弹簧的弹性系数,由此即得:

由此可见,只要已知 ,并测出重锤位移Δl,则可求得两点的重力差Δg。C称为重力仪格值,它可以通过实验方法或在已知重力差的两点上作对比观测来确定。
,并测出重锤位移Δl,则可求得两点的重力差Δg。C称为重力仪格值,它可以通过实验方法或在已知重力差的两点上作对比观测来确定。
通常静重力仪的弹性系统是用一根两端固定的水平金属扭转弹簧,在其中部焊接一根金属摆杆,摆杆末端的重锤上悬挂一根测量弹簧。当作用在重锤上的重力发生变化时,可以伸缩测量弹簧,使摆杆保持原来的静平衡位置。这样通过测量弹簧的伸缩量来测定重力的变化。静重力仪的特点是重力变化同弹簧的伸缩量成线性关系。
单位重力引起弹簧的伸缩量或摆杆倾角变化量称为重力仪的灵敏度。显然,要提高重力的测量精度,必须提高重力仪的灵敏度。助动型重力仪即是按此要求设计的。
助动型重力仪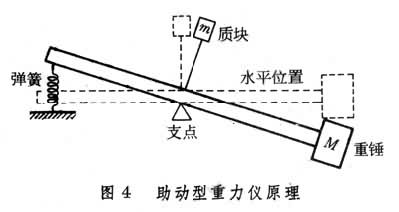
原理如图4所示。作用在摆杆上的力矩除重力矩和弹性力矩外,还增加一个装在支点上方的质块m作用的力矩,当摆杆方向倾斜时,质块m对支点的力矩增大,促使摆杆下倾更多,从而提高了重力仪的灵敏度。但这时摆杆的平衡状态是非稳定的。中国制造的助动型重力仪曾用于珠穆朗玛峰地区的重力测量(图5)。其弹性系统的结构在于多了一个石英弹簧(又称为助动弹簧)。起着图4中质块 m的作用。这种重力仪所反映的重力变化同测量弹簧的伸缩量不成线性关系。

由于相对重力仪中的弹簧存在弹性疲劳现象,因而重力仪会产生零点漂移,即在重力不变的情况下,重力仪的读数随时间而变化。零点漂移严重影响重力仪的测量精度,而且通常只能在观测值中加以改正,不能完全消除。
为了克服相对重力仪的零点漂移,60年代末,美国试制成功超导重力仪。超导重力仪根据超导现象制成,是在低温情况下用超导铌丝绕成两组线圈,分别安装在超导球周围和下方,超导球是用铝制成的空心小球,外表涂铅。线圈接通电流后,立即切断电源,线圈之间形成一个永久磁场。超导球由于抗磁性而悬浮在磁场中。当悬浮力同作用在小球上的重力平衡时,超导球静止在一个位置上。在这种情况下,超导线圈的磁场相当于一根机械弹簧,超导小球相当于重锤。当重力发生变化时,超导球也随之上下移动,且呈线性关系。超导球位移量可采用电容传感器检测,进而求出重力变化。由于超导电流的固有稳定性,致使超导重力仪的零点漂移极其微小,但是,这种仪器现在只能用于固定台站的观测。