[拼音]:tubian lilun
[外文]:catastrophe theory
20世纪70年代发展起来的一个新的数学学科。一种自然现象或一个技术过程,在发展变化过程中常常会从一个状态跳跃式地变到另一个状态,或者说经过一段时间缓慢的连续的变化之后,在一定的外界条件下,会产生一种不连续的变化,这就是所谓的突变现象。这类突变现象在大自然里以及在技术过程中都是普遍存在的。例如,一定质量的气体在一定的温度和压力之下会变成液体,天气的突然变化会产生暴风雨,地壳的剧烈运动会引起地震,桥梁的扭曲会导致断裂,容器里的几种物质在一定的外界条件下会发生化学反应,胚胎的发育,等等,这些现象都是突变现象。以前科学家们在研究这类突变现象时遇到了各式各样的困难,其中主要困难之一就是缺乏恰当的数学工具来提供描述它们的数学模型。1969年法国数学家R.托姆在他的题为《生物学中的拓扑模型》一文中,首次在奇点分类的基础上提出了一个描述突变现象的数学模型。稍后,他在著名的《结构稳定与形态发生》一书中又系统地阐述了他的思想,这就是现在人们所称的突变理论。
泽曼机是E.C.泽曼为阐述突变理论而构造的一个力学例子。D是一个半径为1的圆盘,它可以围绕xy平面的原点O自由转动。A是xy平面上的一个固定点,AO的长为3,B是圆盘上的一个固定点,取两条长度为1的弹性带子,把其中的一条的一端固定在点A,另一端固定在圆盘上的点B处;另一条弹性带子的一端固定在B处,另一端C在平面上自由移动。当点C在平面上连续变动时,只要BC的长度大于1,那么在弹性力的作用下,一般说来,圆盘是跟着C点的移动而连续地转动。在实验中发现,当C移动到某些点时,圆盘会从一个状态跳跃到另一个状态,发生了不连续的变化即突变。通过实验就可以看到这种突变点构成一条如图1
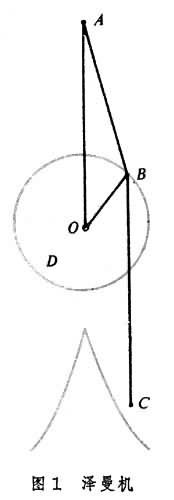
所示的尖点状的曲线。对这样一个力学系统的运动,取直线OA为y轴,首先找出刻画圆盘状态的参数,可以用OB与OA的夹角θ来刻画圆盘的状态并称θ为状态参数,或称内参数。点C的运动控制着圆盘的运动,所以点C的坐标(x,y)就称为控制参数或外参数。由胡克定律可知,这个力学系统有个势函数。当两条弹性带子的长度分别为l1、l2时,它们的总势能为V=(l1-1)2+(l2-1)2,式中l1=AB,l2=BC,将
代入V,可以看出V是θ、x、y的函数。由极小势能原理可知,当点C的坐标为(x0,y0)时,圆盘状态θ0应使V(θ0,x0,y0)为势函数V(θ,x,y)的极小值。也就是说,这个力学系统的状态(θ,x,y)应满足方程式 。在三维空间(θ,x,y)∈R3中, 方程式
。在三维空间(θ,x,y)∈R3中, 方程式 确定一曲面,记作MV并称它为状态曲面或突变流形。它上面的点代表这个力学系统的一个状态。从奇点理论研究的结果知道,可以选取适当的坐标 (φ,u,υ)使得函数V在新坐标系中有很简单的分析表达式:
确定一曲面,记作MV并称它为状态曲面或突变流形。它上面的点代表这个力学系统的一个状态。从奇点理论研究的结果知道,可以选取适当的坐标 (φ,u,υ)使得函数V在新坐标系中有很简单的分析表达式:

而状态曲面MV由方程
所决定。这个曲面图形如图2
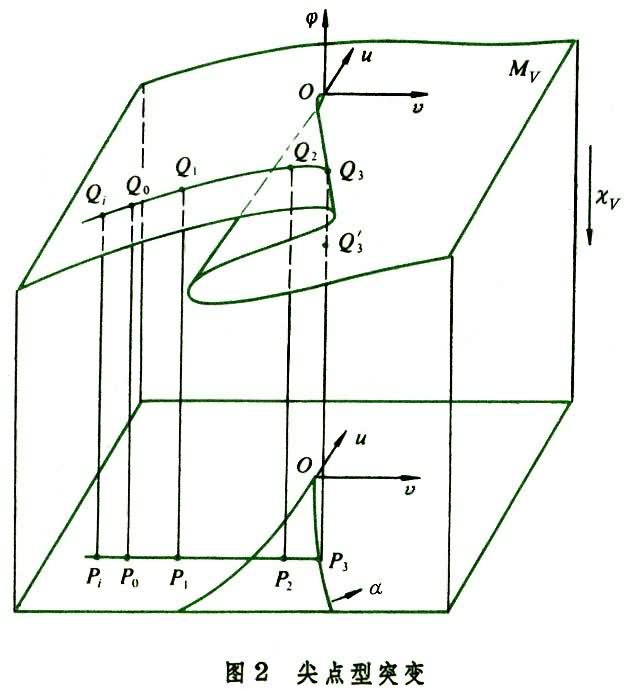
所示。几何上曲面MV是这样描述力学系统运动的:为了使图看起来清晰,把u,υ平面沿φ轴向下平移一个距离,ⅹV表示MV到(u,υ)平面的垂直投影,曲面MV的两条折叠线在ⅹV下的像是一条尖点曲线α,给定一点p0(u0,υ0),圆盘的状态φ0应该使
 ,
,
即 (φ0,u0,υ0)是曲面MV上的一点 Q0,亦即通过点(u0,υ0)平行于φ轴的直线与MV的交点就是 。当控制参数p=(u,υ)在平面上沿一条曲线从p0连续地变到p1,p2时,相应的代表系统状态的点Q就从Q0连续地沿着曲面上一条曲线变到Q1,Q2。但当点p通过曲线上的点p3时,相应的代表系统状态的点Q就从曲面的折叠处(悬崖上)掉到曲面的下面一叶上的点Q3,这就是代表系统状态的点Q产生了不连续的跳跃,即描述了系统的突变运动。曲线α具有重要性质:当控制参数(u,υ)穿过它时,系统状态产生突变。曲线α看作点集并称为突变集,而ⅹV称为突变映射。研究一下曲面MV和映射ⅹV:MV→R2就可以看到曲线α就是映射ⅹV的奇点集在ⅹV下的像。因此,若要找突变集,首先是要求出ⅹV的奇点集。
。当控制参数p=(u,υ)在平面上沿一条曲线从p0连续地变到p1,p2时,相应的代表系统状态的点Q就从Q0连续地沿着曲面上一条曲线变到Q1,Q2。但当点p通过曲线上的点p3时,相应的代表系统状态的点Q就从曲面的折叠处(悬崖上)掉到曲面的下面一叶上的点Q3,这就是代表系统状态的点Q产生了不连续的跳跃,即描述了系统的突变运动。曲线α具有重要性质:当控制参数(u,υ)穿过它时,系统状态产生突变。曲线α看作点集并称为突变集,而ⅹV称为突变映射。研究一下曲面MV和映射ⅹV:MV→R2就可以看到曲线α就是映射ⅹV的奇点集在ⅹV下的像。因此,若要找突变集,首先是要求出ⅹV的奇点集。
由这个力学的实例可以概括出研究突变现象的数学方法:
(1)确定刻画系统状态的参数 (x1,x2,…,xn)及系统的控制参数(u1,u2,…,ur)。在上例中就是确定出刻画圆盘的状态的参数θ以及控制参数(x,y)。
(2)确定支配系统的势函数p(x1,x2,…,xn;u1,u2,…,ur)在控制参数为(u1,u2,…,ur)时系统的平衡态(x1,x2,…,xn)使得势函数p取极小值,在上例中就是找出系统的弹性势能V(θ,x,y)。
(3)确定系统所有可能出现的平衡态构成的空间Mp,Mp是Rn+r中由方程式
所确定的子流形。
(4)研究Mp到Rr(u1,u2,…,ur)上的投影
 ,以Σp记 ⅹp的奇点集,Rr(u1,u2,…,ur)中的ⅹp(Σp)称为分歧集。它确定了突变可能发生的范围。
,以Σp记 ⅹp的奇点集,Rr(u1,u2,…,ur)中的ⅹp(Σp)称为分歧集。它确定了突变可能发生的范围。
一般说来,势函数可以是非常复杂的。但是托姆关于基本突变分类定理告诉人们,尽管势函数 p千千万万,但是只要势函数的控制参数u1,u2,…,ur的个数不超过4,用奇点的语言就是:p(x1,x2,…,xn)的余维r≤4,结构稳定的势函数的拓扑型(即在坐标的微分同胚变换之一)只有七种类型(见表
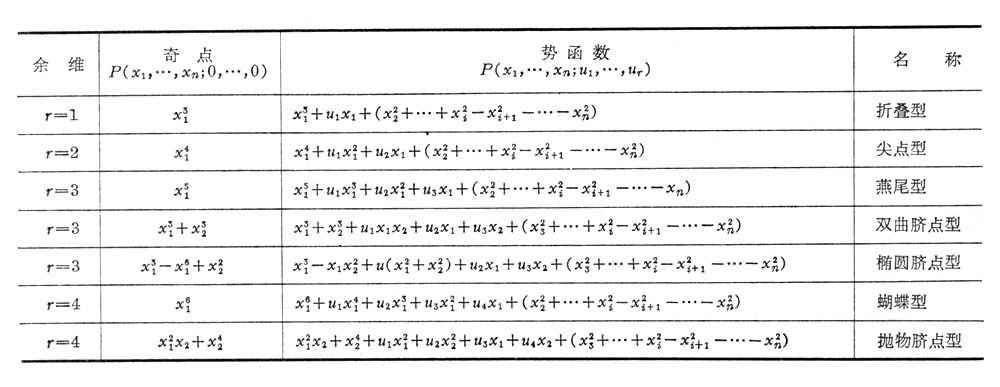
)。
- 参考书目
- R.Thom,Structural Stability and Morphogenesis, W.A.Benjamin, Reading, Mass.,1975.
- R.Thom, Topological Models in Biology,Topology 8,pp.313~355, 1969.