[拼音]:oulajiao
[外文]:Eulerian angles
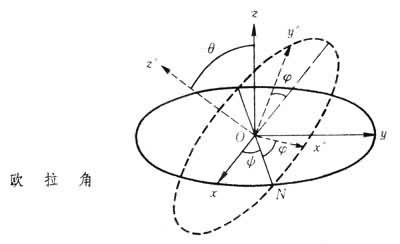
用来唯一地确定定点转动刚体位置的三个一组独立角参量,由章动角θ、进动角ψ和自转角φ组成,为L.欧拉首先提出,故得名。它们有多种取法,下面是常见的一种。
如图所示,由定点O作出固定坐标系Oxyz 以及固连于刚体的坐标系Ox┡y┡z┡。以轴Oz和Oz┡为基本轴,其垂直面Oxy和Ox┡y┡为基本平面。由轴Oz量到Oz┡的角度θ称为章动角。平面zOz┡的垂线ON称为节线,它又是基本平面Ox┡y┡和Oxy的交线。在右手坐标系中,由ON的正端看,角θ应按逆时针方向计量。由固定轴Ox量到节线ON的角度ψ称为进动角;由节线ON量到动轴Ox┡的角度φ称为自转角。由轴Oz和Oz┡正端看,角ψ和φ也都按逆时针方向计量。欧拉角(ψ,θ,φ)的名称来源于天文学。
三个欧拉角是不对称的,且在几个特殊位置上具有不确定性(当θ=0时,φ和ψ就分不开)。对不同的问题,宜取不同的轴作基本轴,并按不同的方式量取欧拉角。
若令Ox┡y┡z┡的原始位置重合于Oxyz,经过相继绕Oz、ON和Oz┡的三次转动Z(ψ)、N(θ)、Z┡(φ)后,刚体将转到图示的任意位置(见刚体定点转动)。变换关系可写为:
R(ψ,θ,φ)=Z┡(φ)N(θ)Z(ψ),
式中R、Z┡、N、Z是转动算子,并可用矩阵表示如下:

在进行转动算子的乘法运算时,应从最右端做起。
刚体上任一点Q在两个坐标系中的坐标x、y、z和x┡、y┡、z┡都可以通过矢径 的模和方向余弦来表出。两组坐标之间有如下变换关系:
的模和方向余弦来表出。两组坐标之间有如下变换关系:
x=x┡cos(x,x┡)+y┡cos(x,y┡)+z┡cos(x,z┡),y=x┡cos(y,x┡)+y┡cos(y,y┡)+z┡cos(y,z┡),z=x┡cos(z,x┡)+y┡cos(z,y┡)+z┡cos(z,z┡)。
反变换只须在同名坐标间对调记号。
如果刚体绕通过定点O 的某一轴线以角速度ω转动,而ω在与刚体固连的活动坐标系Ox┡y┡z┡上的投影为 、
、 、
、 ,则它们可用欧拉角及其微商表示如下:
,则它们可用欧拉角及其微商表示如下:
 =ψsinθsinφ+θcosφ,
=ψsinθsinφ+θcosφ,
 =φsinθcosφ-θsinφ,
=φsinθcosφ-θsinφ,
 =ψcosθ+ψ。
=ψcosθ+ψ。
由上式可以看出,如果已知ψ、θ、φ和时间的关系,则可用上式计算角速度ω在活动坐标轴上的三个分量;反之,如在任一瞬时已知t和ω的各个分量,也可利用上式求出ψ、θ、φ和时间t的关系,因而也就决定了刚体运动。我们通常把上式叫做欧拉运动学方程。