[拼音]:gaocheng xitong
[外文]:height systems
采用不同的基准面表示地面点的高低所产生的几种不同的高程表示法,或者对水准测量数据采取不同的处理方法所产生的几种高程表示法。有正高、正常高、力高和大地高程等系统。
高程基准面基本上有两种:一是大地水准面,它是正高和力高的基准面;二是椭球面,它是大地高程的基准面。此外,为了克服正高不能精确计算的困难还采用正常高,以似大地水准面为基准面,它非常接近大地水准面。
正高系统
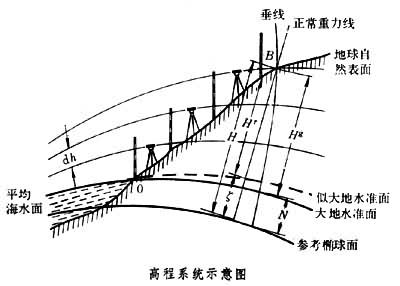
沿地面点B 的垂线方向到大地水准面的距离Hg,称为B点的正高(如图),这样定义的高程系统称为正高系统,其计算公式为:
 ,
,
式中dh为沿水准路线测得的高差;g为沿水准路线的重力值,由重力测量求得;gm为沿地面点B的垂线至大地水准面之间的平均重力值。要推算这种平均重力值,必须知道地面和大地水准面之间岩层的密度分布,这是不能用简单方法来推求的。所以过去都是采用近似的数据,只能求得正高的近似值。
正常高系统
1945年苏联的M.C.莫洛坚斯基提出了正常高的概念,即将上式中的分母gm改用平均正常重力值γm来代替,也就是正常高为:
 ,
,
式中γm是可以精确计算的,因此正常高也可以精确地计算出来。由各地面点沿正常重力线向下截取各点的正常高,所得到的点构成的曲面,称为似大地水准面,它是正常高的基准面。似大地水准面很接近于大地水准面,在海洋上两者是重合的,在平原地区两者相差不过几厘米,在高山地区两者最多相差2米。
似大地水准面不是等位面,没有明确的物理意义。它是由各地面点按公式计算的正常高来定义的,这是正常高系统的缺陷,但其优点是可以精确计算,不必引入人为的假定。中国《大地测量法式》规定采用正常高系统。
大地高程系统
地面点在三维大地坐标系中的几何位置,是以大地经度、大地纬度和大地高程表示的。大地高程以椭球面为基准面,是由地面点沿其法线到椭球面的距离,如图中的H。大地高程可直接由卫星大地测量方法测定,也可由几何和物理大地测量相结合来测定。采用前一种方法时,直接由卫星定位技术测定地面点在一全球地心坐标系中的大地高程;采用后一种方法时,大地高程分为两段来测定,其中由地面点至大地水准面或似大地水准面的一段由水准测量结果加上重力改正而得,由大地水准面或似大地水准面至椭球面的一段由物理大地测量方法求得。当以大地水准面为过渡面时,则:
H =Hg+N,
式中N为大地水准面至椭球面的差距,称为大地水准面起伏。如以似大地水准面为过渡面,则:
H =H r+ζ,
式中ζ为似大地水准面至椭球面的距离,称为高程异常。由于正高Hg是由地面点沿垂线至大地水准面的距离, 而正常高H r是由地面点沿正常重力线至似大地水准面的距离,所以由上述两种方法计算得出的大地高程有差异,差数约为十分之几毫米。
力高系统
由于同一水准面上的各点在正高或正常高系统中的高程值不同,因而对于大规模的水利工程来说,使用很不方便。为了使同一水准面上各点有相同的高程值,可以采用力高系统。力高按下式计算:
 ,
,
式中γo是适当选择的某一纬度嗘0处(例如采用45°或某一地区的平均纬度)的正常重力值。地面点的力高定义为通过该点的水准面上纬度嗘0处的正高,即一个水准面上各点的力高都等于该面上纬度τ0处的正高。力高一般不作为国家的高程系统,只用于解决局部地区有关水利建设的问题。
地球位数
地面点的高低也可以用地球位数表示。它定义为大地水准面的位W0与通过地面点的水准面的位W之差,即:
 。
。
由此可见,地球位数也是以大地水准面为基准面,但它不是以米制表示的高程,而是位差。同一水准面上所有各点的地球位数相同。地球位数之差,可由每一水准测量线段观测的高差乘以该线段适当的平均重力观测值而得。若重力值以千伽为单位,观测高差以米为单位,因为地面重力值近似等于0.98千伽,于是,以地球位数表示的两地面点间的位差比以米表示的高差约小2%。用地球位数表示的水准测量结果,换算为正高、正常高或力高系统时都比较方便,这是地球位数的优点。所以有些国家同时采用地球位数、正高和力高计算一、二等水准网,欧洲统一水准测量系统甚至采用位于阿姆斯特丹的一个水准点的地球位数作为高程起算基准。
以上 4种高程系统和地球位数都需要知道水准点上的重力值,因此,沿精密水准测量路线要以适当方式实施重力测量,供处理水准测量数据之用。