[拼音]:tianwen daohang
[外文]:celestial navigation
通过观测天体来测定航行中的舰船或飞机所在位置的一门学科。1837年,萨姆纳提出了利用等高线同时解算经纬度的方法,这个方法的基本原理沿用至今。
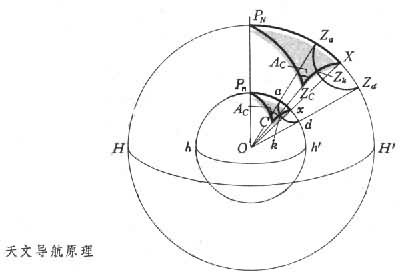
在航海、航空中,天文导航测定的位置,不是由所观测的天体在天球上的位置来决定的,而是由这些天体在观测时刻所对应的地理位置来决定的。图中内圆为地球,外圆为天球。O为天球中心,也是地心。PN,Pn分别为天极和地极。大圆HH┡为天赤道,大圆hh┡为地球赤道。X为所观测的天体在天球上的位置。x为X和O的连线在地面上的交点,即天体的地理位置,亦称星下点。C为预先推算的舰船或飞机的位置(称为推算位置),它的天顶为ZC。
航行者通过观测求得天体 X的高度(或天顶距)。此时,观测者是在以x为中心、以观测天顶距为半径的小圆akd上。这个小圆akd称为等高圈。靠近推算位置的等高圈的一小段弧,称为等高度线或位置线,等高线接近于一直线。根据观测时刻天体的赤纬和格林威治时角以及推算位置的经纬度,由三角形PNZCX解算出天体的方位角AC和天体的计算天顶距ZCX。天体的观测天顶距XZk和计算天顶距之差ZCZk或Ck称为截距。以推算位置 C为坐标原点,根据方位角AC作一方位线,在其上截取一线段,使其长度等于截距Ck,过截取点作方位线的垂线,即为所求的等高线或位置线。舰船或飞机的真位置。就在这条线上。再观测另一天体,又可得到一条位置线。两条位置线的交点,即舰船或飞机的位置点。航海定位要求方位角精确到0°1,截距精确到0奞1。航空定位只要求方位角精确到1°,截距精确到1┡。为了提高精度,实际上往往要观测三个以上的天体。各天体之间的方位角差要在30°~150°之间,最好在60°~90°之间;高度最好在15°~65°之间。为便于计算,实用上还编制出专门的计算表册和图解仪器。一般观测的天体为太阳、月球、几个大行星和几十颗亮的恒星。在天文年历和航海、航空天文年历中,都刊载有这些天体的位置。在天文导航中一般用六分仪观测天体,并用记时仪记录观测时刻。航海时一般要在早晚晨昏蒙影期间进行观测,航空则不受此限制。在地面上利用天文导航测定舰船或飞机的位置,受天气条件影响较大。随着电子技术的进步,已发展了多种无线电导航技术来克服这方面的缺陷。宇宙航行开始以后,为了确定宇宙飞船在空间的位置和航向,天文导航也有相当重要的作用。