[拼音]:dongtai wucha
[外文]:dynamic error
控制系统在任意的输入信号作用下达到稳态时的控制误差。通常,动态误差的概念都假定是在线性定常系统(见线性系统、定常系统)的情形下加以讨论的。与稳态误差不同,动态误差是以时间为变量的函数,能提供系统为稳态时控制误差随时间变化的规律。如果控制系统的输入r(t)对t的各阶导数均存在,并且分别用r(t),┑(t),…来表示,则动态误差eS(t)可表示为
 (t→∞)
(t→∞)
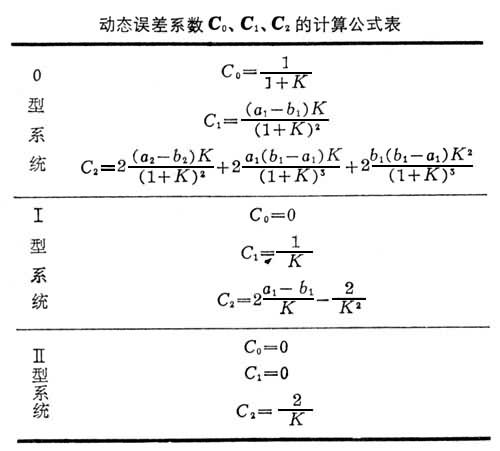
式中系数 C0、C1、C2…称为动态误差系数。在控制工程中常称C0为动态位置误差系数,C1为动态速度误差系数,C2为动态加速度误差系数。动态误差系数的数值可根据控制系统的参数来决定。把系统开环传递函数G(s)H(s)表示成如下的形式:
式中K为系统增益,v 为系统中积分环节的个数。此时,动态误差系数 C0、C1、C2的计算公式如下表。
动态误差系数与静态误差系数之间存在如下的对应关系:
对0型系统 静态位置误差系数
对Ⅰ型系统 静态速度误差系数
对Ⅱ型系统 静态加速度误差系数 在控制系统的设计中,有时也把C0、C1和C2作为一种性能指标。
在控制系统的设计中,有时也把C0、C1和C2作为一种性能指标。