[拼音]:guodu guocheng
[外文]:transient process
在输入的作用下,系统输出变量由初始状态到最终稳态的中间变化过程。过渡过程又称暂态,过渡过程结束后的输出响应称为稳态。系统输出响应由暂态响应和稳态响应组成。过渡过程的现象广泛存在于各类系统中。火车在制动作用下的减速过程和钢锭在加热炉中的升温过程都是典型的例子。过渡过程的形态对自动控制系统性能的好坏有直接的影响。如果一个控制系统在受到外部扰动作用后,过渡过程呈现为持续的振荡,这个系统就不能正常工作。对过渡过程的研究是经典控制理论的基本内容之一。分析过渡过程的目的,是为了了解它的规律,避免有害的过渡过程,设计和构造出具有满意性能的自动控制系统。
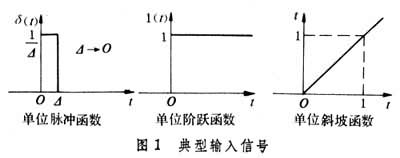
典型输入信号实际控制系统的输入作用(控制信号或扰动)在很多情况下是无法事先确定的。在分析过渡过程时,往往采用一些简单的时间函数,如单位脉冲函数、单位阶跃函数和单位斜坡函数等,作为典型的输入信号。图1中是典型输入信号的形状。采用典型输入信号,便可以在同一基准下比较各个系统的性能。只要系统在典型输入作用下的过渡过程具有满意的性能,则系统对实际输入信号的过渡过程响应通常也能满足要求。
 评价过渡过程的性能指标
评价过渡过程的性能指标
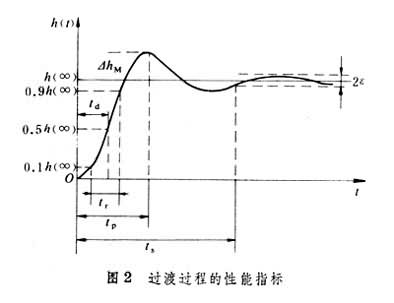
过渡过程的性能指标是根据系统在单位阶跃作用下的输出响应曲线来规定的。为便于比较,假定系统在外输入作用前处于零平衡状态。系统在单位阶跃作用下过渡过程的曲线的典型形状如图2。常用的评价过渡过程的性能指标有延迟时间、上升时间、峰值时间、超调量和过渡过程时间。
(1)延迟时间td响应曲线第一次达到50%稳态值所需要的时间。
(2)上升时间tr响应曲线由稳态值的10%上升到90%所需要的时间。
(3)峰值时间tp响应曲线达到第一个峰值所需要的时间。
(4)超调量σ响应曲线的最大峰值对稳态值的增量与稳态值的百分比,即
(5)过渡过程时间ts在响应曲线的稳态线上作宽为2ε的一个允许误差范围,响应曲线开始达到并保持在误差范围内所需要的时间。在大多数情况下,取 ε=(5~2%)h(∞)。
在上述性能指标中,上升时间反映响应的快速性,超调量表示响应的振荡程度,过渡过程时间是衡量过渡过程长短的一种尺度。系统的快速性和振荡性之间往往不能同时兼备;如果其中一个较好,则另一个必然较坏,因而只能折衷考虑确定。
一阶系统的过渡过程规律
可用一阶微分方程表征的系统称为一阶系统,是最简单的一类系统。一阶系统微分方程的典型形式为 ,式中y为输出变,量u为输入变量,T为时间常数。输入u为单位阶跃时的输出过渡过程
,式中y为输出变,量u为输入变量,T为时间常数。输入u为单位阶跃时的输出过渡过程 是由0变化到1的指数曲线(图3)。表征一阶系统过渡过程快慢的惟一参数是T,称为时间常数。一阶系统过渡过程的性能指标值为:延迟时间td=0.69T,上升时间tr=2.2T,超调量σ=0,过渡过程时间ts=3T(当取ε=5%)或ts=4T (当取ε=2%)。
是由0变化到1的指数曲线(图3)。表征一阶系统过渡过程快慢的惟一参数是T,称为时间常数。一阶系统过渡过程的性能指标值为:延迟时间td=0.69T,上升时间tr=2.2T,超调量σ=0,过渡过程时间ts=3T(当取ε=5%)或ts=4T (当取ε=2%)。
二阶系统是由二阶微分方程表征的系统。二阶微分方程的典型形式为
式是y为输出变量,u为输入变量。系统在单位阶跃作用下的输出响应可由求解此方程来定出,它的形态由阻尼比ζ和自然频率ωn来表征,存在两种情况。
(1)阻尼比ζ>1的情况 此时,响应曲线是单调地由零变化到稳态值 1的,过渡过程中不呈现振荡性形态,又称为过阻尼情况。过阻尼时二阶系统的过渡过程规律可用下式来表征:
相应的性能指标为:延迟时间 ,上升时间
,上升时间 ,超调量σ=0。
,超调量σ=0。
(2)阻尼比 ζ<1的情况 这时过渡过程中出现振荡的形态,并且随ζ值减小而加剧,又称欠阻尼情况。当ζ=0时为不衰减振荡。二阶系统在欠阻尼时的过渡过程规律可用下式来表征:

式中角频率 , 初始相角θ=cos-1ζ。对应的性能指标为: 延迟时间
, 初始相角θ=cos-1ζ。对应的性能指标为: 延迟时间  , 上升时间
, 上升时间 ,峰值时间
,峰值时间 ,超调量
,超调量 ,过渡过程时间
,过渡过程时间 (当取ε=5%)或
(当取ε=5%)或 (当取ε=2%)。
(当取ε=2%)。
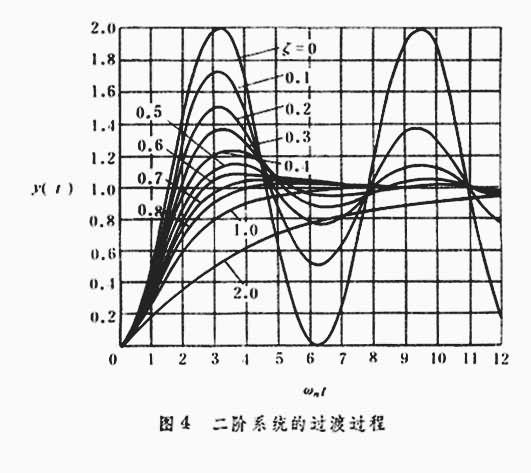
当阻尼比ζ=1时,过渡过程形态处于过阻尼和欠阻尼的临界情况。这种情况只有理论上的意义。图4中画出了二阶系统过渡过程在不同ζ值时的一组曲线。
高阶系统的过渡过程规律当系统特性用传递函数G(s)的形式给出时,过渡过程规律可通过对G(s)R(s)求拉普拉斯反变换来求出,R(s)是输入变量r(t)的象函数(见拉普拉斯变换)。通常高阶系统的过渡过程形态要复杂得多,其性能指标也只能用数值方法来计算。