[拼音]:zhendong
[外文]:vibration
物体经过它的平衡位置所作的往复运动或某个物理量在其平均值(或平衡值)附近的来回变动。
概述振动是自然界最普遍的现象之一。大至宇宙,小至亚原子粒子,无不存在振动。各种形式的物理现象,包括声、光、热等都包含振动。人们生活中也离不开振动:心脏的搏动、耳膜和声带的振动,都是人体不可缺少的功能;人的视觉靠光的刺激,而光本质上也是一种电磁振动;生活中不能没有声音和音乐,而声音的产生、传播和接收都离不开振动。在工程技术领域中,振动现象也比比皆是。例如,桥梁和建筑物在阵风或地震激励下的振动,飞机和船舶在航行中的振动,机床和刀具在加工时的振动,各种动力机械的振动,控制系统中的自激振动,等等。
在许多情况下,振动被认为是消极因素。例如,振动会影响精密仪器设备的功能,降低加工精度和光洁度,另剧构件的疲劳和磨损,从而缩短机器和结构物的使用寿命。振动还可能引起结构的大变形破坏,有的桥梁曾因振动而坍毁;飞机机翼的颤振、机轮的抖振往往造成事故;车船和机舱的振动会劣化乘载条件;强烈的振动噪声会形成严重的公害。
然而,振动也有它积极的一面。例如,振动是通信、广播、电视、雷达等工作的基础。50年代以来,陆续出现许多利用振动的生产装备和工艺。 例如, 振动传输、振动筛选、振动研磨、振动抛光、振动沉桩、振动消除内应力等等。它们极大地改善了劳动条件,成十、百倍地提高劳动生产率。可以预期,随着生产实践和科学研究的不断进展,振动的利用还会与日俱增。
各个不同领域中的振动现象虽然各具特色,但往往有着相似的数学力学描述。正是在这种共性的基础上,有可能建立某种统一的理论来处理各种振动问题。振动学就是这样一门基础学科,它借助于数学、物理、实验和计算技术,探讨各种振动现象的机理,阐明振动的基本规律,以便克服振动的消极因素,利用其积极因素,为合理解决实践中遇到的各种振动问题提供理论依据。
振动系统分类机械振动是指机械系统(即力学系统)中的振动。任何力学系统,只要它具有弹性和惯性,都可能发生振动。这种力学系统称为振动系统。振动系统可分为两大类,离散系统和连续系统。连续系统具有连续分布的参量,但可通过集中参量法化为离散系统。
按自由度划分,振动系统可分类为有限多自由度系统和无限多自由度系统。前者与离散系统相对应,后者与连续系统相对应。
离散系统由集中参量元件组成。力学系统中的集中参量元件有三种:质量、弹簧和阻尼器。它们都是理想化的力学模型。质量(包括转动惯量)是只具有惯性的力学模型。弹簧是不计本身质量,只具有弹性的“模型”;弹性力和形变一次方成正比的弹簧,称为线性弹簧。阻尼器模型既不具有惯性,也不具有弹性。它是耗能元件,在运动时产生阻力;阻力与速度一次方成正比的阻尼器,称为线性阻尼器。
离散系统在工程上有广泛的代表性。例如,固定在混凝土基础上的精密机床,基础下面还铺有弹性衬垫(图1)。
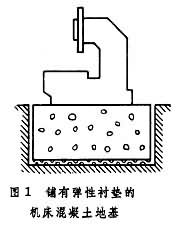
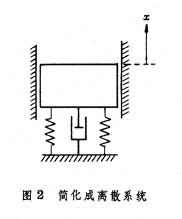
进行隔振分析时,需要考察机床和基础的整体振动。这时,考虑到机床和基础的弹性远比衬垫小得多,故可略去其弹性而把它们视为集中质量;另一方面,衬垫的质量远比机床和基础的质量小得多,可以略去,而把衬垫看作弹簧;而衬垫本身的内摩擦以及基础和周围约束之间的摩擦起着阻尼的作用,可以把它们合在一起看作是一个阻尼器。因而,在隔振分析中,这一系统可简化为离散系统(图2)。当然, 在分析机床本身的振动或机床、工件、 刀具系统的振动时, 必须考虑机床本身的弹性。通过适当简化,机床本身又可看作一个离散系统。离散系统的运动,数学上用常微分方程描述。
连续系统是由弹性体元件组成的。弹性体可以看作由无数质点组成。各质点间有弹性联系,只要满足连续性条件,任何微小的相对位移都是可能的。因此,一个弹性体有无限多个自由度。典型的弹性体元件有杆、梁、轴板、壳等。
弹性体的惯性、弹性与阻尼是连续分布的,故称连续系统。工程上许多振动系统取连续系统的模型。例如,涡轮盘通常取为变厚度的圆板,涡轮叶片通常取为变截面的梁或壳等。连续系统的运动,数学上用偏微分方程描述。
参量的变化规律可用时间的确定函数描述的振动系统,称为定则系统(又称确定性系统)。如果系统中的各个特性参量(质量、刚度、阻尼系数等)都不随时间而变,即它们不是时间的显函数,就称这系统为常参量系统;反之,则称为变参量系统。常参量系统的运动用常系数微分方程描述。而描述变参量系统需要用变系数微分方程。
若系统参量变化无常,无法用时间的确定函数描述,而只能用有关统计特性描述,这种系统就称为随机系统(见随机振动)。
一个质量不随运动参量(坐标、速度、加速度等)的变化而变化,且其弹性力与阻尼力都可以简化为线性模型的振动系统称为线性系统(见线性振动)。线性系统的运动用线性微分方程描述。凡是不能简化为线性系统的振动都称为非线性系统(见非线性振动)。
严格地说,实际振动系统的弹性力和阻尼力往往不符合线性模型。但在许多情形下,只要系统振幅不大,从线性弹簧和线性阻尼的假设出发,常可得出足够准确的有用结论。但也有不少振动过程,如果不考虑非线性因素,就无法说明有关现象;各种自激振动现象就是最典型的例子。为方便起见,有时故意引入一些非线性因素来达到预期的目的。例如,采用各种限位器、继电型控制器等。在这种情况下,就可以按非线性问题来处理。
一个实际振动系统应该采用何种简化模型,需要根据具体情况来确定。同一系统,在不同条件下,可采用不同模型。例如,受迫振动中阻尼的影响,在远离共振情况下可不考虑,从而能使计算大为简化。但在共振的情况下,阻尼起决定性作用,绝对不能略去。又如在计算简支梁的最低阶固有频率时,可假设它的一半质量集中于梁的中点处,由此可得到很准确的结果,而在研究梁受冲击荷载引起的响应时,上述假设将导致错误的结论。因此,所采用模型的正确与否,还得由实践加以检验。
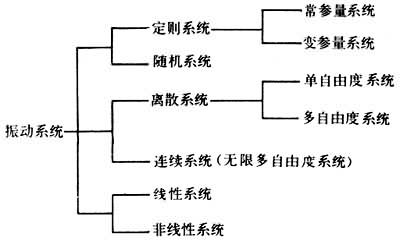
综上所述,振动系统的分类如下:
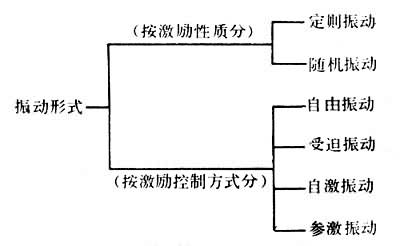
 振动形式分类
振动形式分类
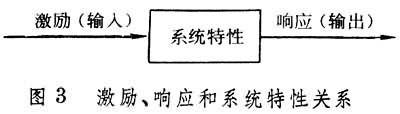
一个系统受到激励,会呈现一定的响应。激励作为系统的输入,响应作为系统的输出,二者与系统的特性的联系如图3。系统的激励可分为两大类:定则激励和随机激励。
可用时间确定函数来描述的激励称为定则激励。脉冲激励、阶跃激励、谐和激励、周期激励都是典型的定则激励。一个定则系统受到激励时,响应也是定则。这类振动称为定则振动。
随机激励则不能用时间的确定函数描述,但它们具有一定的统计规律性,可用随机函数描述。即使是定则系统。在受到随机激励时,系统的响应也会是随机的。这类振动称为随机振动。
此外,振动还可以按激励的控制方式分为四类。
(1)自由振动:通常指弹性系统在偏离平衡状态后,不再受到外界激励的情形下所产生的振动。
(2)受迫振动:指弹性系统在受外界控制的激励作用下发生的振动。这种激励不会因振动被抑制而消失。
(3)自激振动:指弹性系统在受系统振动本身控制的激励作用下发生的振动。在适当的反馈作用下,系统会自动地激起定幅振动。一旦振动被抑制,激励也随之消失。
(4)参激振动:指激励方式是通过周期地或随机地改变系统的特性参量来实现的振动。归纳起来,振动形式的分类如下:
 研究方法
研究方法
对于定则系统或随机系统的振动问题,一般都是在已知激励、响应、系统特性中的二者而求第三者。在激励条件和系统特性已知的情况下,求系统的响应,称为振动分析。在系统特性和响应已知的情况下,反推系统的激励,称为振动环境预测。在激励和响应均为已知的情况下,确定系统的特性,称为振动特性测定或系统识别。还有另一种提法是振动综合或振动设计,即在一定的激励条件下,如何确定系统的特性,使系统的响应满足指定的条件。
实际振动问题往往错综复杂,它可能同时包含识别、分析、综合等几方面的问题。通常将实际问题抽象为力学模型,实质上是系统识别问题。针对系统模型列式求解的过程,实质上是振动分析的过程。分析并非问题的终结,分析的结果还必须用于改进设计或排除故障(实际的或潜在的),这就是振动综合或设计的问题。
解决振动问题的方法不外乎通过理论分析和实验研究,二者是相辅相成的。在振动的理论分析中大量应用数学工具,特别是数字计算机的日益发展为解决复杂振动问题提供了强有力的手段。从60年代中期以来,振动测试技术有了重大突破和进展,这又为振动问题的实验、分析和研究开拓了广阔的前景。见线性振动,非线性振动,随机振动。
- 参考书目
- R. E. D. Bishop, Vibration, 2nd ed., Cambridge Univ.Press, Cambridge,1979.
- C. M. Harris and C. E. Crede,ed.,Shock and Vibration Handbook,2nd ed., McGraw-Hill,New York,1976.
参考文章
- 请详细阐述更换振动信号输入端口的步骤。测控技术
- 热工测量仪表管路,应避免敷设在有腐蚀介质、振动、()和易受机械损伤的场所,并便于检修维护。测控技术
- 振动传感器根据测振原理的不同,可分为非接触式和接触式两类,其中测量轴承振动的探头,非接触式利用()原理工作,接触式利用(测控技术
- 振动给煤机控制系统检修时,电磁振动器的检查要求是()测控技术
- 磁悬浮列车速度快、无噪声、无污染、无振动,它所使用的材料主要是知识题库
- 能引起听觉的声波振动频率是知识题库
- 以下使用插入式混凝土振动器操作哪些不属于违章?生产安全
- 测振传感器根据其测量原理的不同,可以分为为接触式和非接触式两类,其中接触式振动传感器有()测控技术
- 价格振动法的分析股票基金
- 属于磁电感应原理制作的振动传感器,一般检查的质量要求中,除了传感器的安装基面应光滑平整、安装螺孔完好无损;支持弹簧片应无测控技术