[拼音]:weiyifa
[外文]:displacement method
以广义位移(线位移和角位移)为未知量,求解固体力学问题的一种方法。 位移法的思想是法国的C.-L.-M.-H.纳维于1826年提出的。
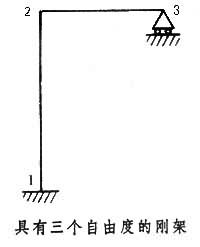
用位移法求解结构问题,第一步须列出物体内所有节点的全部广义位移。这些广义位移的总数目称为节点位移自由度(又称节点位移可动度)。例如图中的平面刚架有3个节点:点1完全被约束,没有广义位移;点2有一个转动位移;点3有一个转动位移和一个水平方向的位移。因此该刚架的节点位移自由度为3。 第二步是将结构的全部广义位移加以约束,所得到的结构体系称为基本体系。在基本体系的一个节点上解除某个广义位移s的约束,此时如果在某个广义位移r的方向上作用一个广义力Krs,它在s方向上引起的广义位移恰好为一个单位,则Krs称为刚度系数。r为s时Krs称为直接刚度系数;r不为s时称为交叉刚度系数。它们可通过结构分析求出。求出各刚度系数后,把外载荷加到基本体系上,就得到用节点未知广义位移表示的位移法平衡方程组。方程数目恰与未知量数目相等,从而可以通过解方程组求出各节点的实际位移,进而可求得全部内力。
通常,用势能原理来建立位移法平衡方程组,具体作法如下:

为系统的总势能,式中xi(i=1,2,…,n)为节点未知广义位移;Ri为载荷引起的第i个节点处的约束反力;dq为载荷作用点的位移;Kqq为在载荷作用点处产生单位广义位移所需的广义力;m为载荷个数;n为自由度。根据最小势能原理,真实情况下的结构应满足如下条件:
 (i=1,2,…,n),
(i=1,2,…,n),
由此得到位移法平衡方程组:
或用矩阵表示为:
[K]{x}+{R}=0,
式中[K]为刚度矩阵;{x}为广义位移阵列;{R}为载荷阵列。上述方程组是关于n个未知量xi(i=1,2,…,n)的n个代数方程组,可解出xi(i=1,2,…n)。
用位移法求解连续弹性体时,由于系统可看作是由无穷多个节点组成的,所以系统具有无穷多个节点位移自由度,这就需要无穷多个方程,因此必须用一些近似方程求解。方法之一是将系统化为有限个单元,只研究单元边界处的位移,这就是有限元法。另一方法是假设位移为一级数形式,每项级数为一已知的满足边界条件的函数,其系数为未知常数,代入平衡微分方程后即可求得系数,从而得到位移。
在实际应用中,根据各类结构的特点,位移法已发展成为多种实用计算法,常用的有转角位移法、变形分配法和力矩分配法等。
- 参考书目
- R.V.Southwell,An Introduction to the Theory of Elasticity for Engineers and Physicists,2nd ed., Oxford Univ.Press, London,1941.