[拼音]:xugong yuanli
[外文]:principle of virtual work
分析静力学的重要原理,又称虚位移原理,是J.-L.拉格朗日于1764年建立的。其内容为:一个原为静止的质点系,如果约束是理想双面定常约束,则系统继续保持静止的条件是所有作用于该系统的主动力对作用点的虚位移所作的功的和为零。它的数学表达式为:
 (1)
(1)
式中Fi为第i个质点上的主动力;δri为其虚位移。
欲使每一个质点保持平衡,应有约束力Ni和主动力Fi成为平衡力系,即Fi+Ni=0。故对每一个质点都有Fi+Ni)·δri=0,它们的总和为:
 (2)
(2)
又因约束是理想约束,故有:
 (3)
(3)
将式(3)代入式(2),即得式(1)。
将主动力F1作用于单自由度机构,必定产生一从动力F2,虚功原理即可简化为:
F1δx1-F2δx2=0
或
F1/F2=δx2/δx1。
这种作用力与位移的反比关系在机械中得到广泛应用。这就是古人早已从杠杆、滑轮、斜面等简单机械中得出的规律──“力学金律”。事实上,这种规律正是虚功原理的雏形。虚功原理的一般性表述是约翰第一·伯努利(见伯努利家族)于1717年作出的。
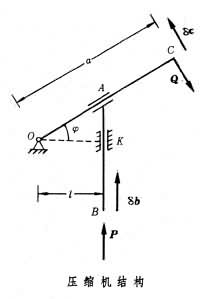
利用虚功原理求解静力学问题,可以避免画受力图、列平衡方程等分别隔离的一套方法,而代之以求系统的各虚位移之间的几何关系。如图示的压缩机构,OC杆可绕O转动,OC杆上的滑块A带动AB杆在铅垂导槽C中滑动。在B上加一主动力P,在C产生垂直于OC的从动力Q。C点的虚位移为δc,B点的虚位移为δb。根据虚功原理便有Q·δc+P·δb=0。因δc=aδ嗞,δb=δ(AC)=δ(ltg嗞)=lsec2嗞δ嗞,所以有Qaδ嗞=Plsec2嗞δ嗞,即
Q=Pl/acos2嗞。
虚功原理也可应用于非理想约束的情况,此时把摩擦力也看作主动力而列入式(1)中。