[拼音]:weiji kongzhi dianlu
[外文]:digital controlled circuit with microcomputer
以经过微型计算机(简称微机)处理的信号作为工作信号的数字控制电路。微机是以大规模及超大规模集成电路组件为主要部件制成的数字式电子计算机。
微机控制电路的优点
微机只由少数几片集成电路构成,因此它通常比模拟控制电路体积小,重量轻,而且价格便宜。微机的组件较少,因此也减少了产生故障和出现错误的机会,增加了系统的可靠性。微机的控制方案由软件来实现,因此它除能实现模拟控制系统的比例积分调节器(PID)调节规律外,还能引入各种先进的控制规律,如非线性控制、前馈复合控制、最优控制以及自适应控制等。在少许改变硬件,甚至完全不改变硬件的情况下,只需修改一些程序段或程序数据就能改变各种控制方案以适应不同控制对象,因而控制装置通用性强,容易实现硬件设备的标准化。微机控制电路属于数字控制电路,因此它具有增加位数便能提高静态精度、不易受温度和电源电压变化等的影响,即稳定性能高的优点。在采用微机的电力传动系统中,故障的检测和保护可以用程序来实现,故可实现故障的自诊断,提高系统可靠性。
微机基础
用微处理器组成的计算机称为微机(图1)。
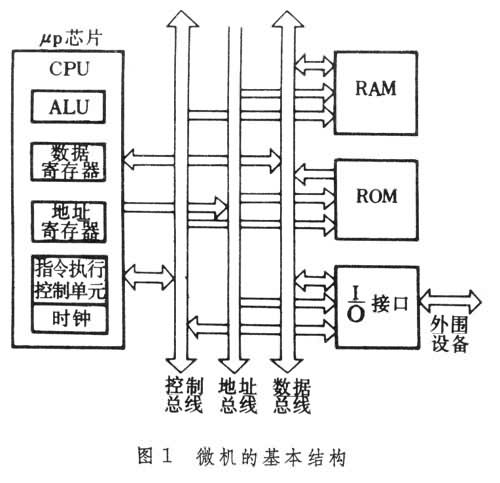
微处理器执行各种计算并具有各种控制功能,它通过一系列指令(称为软件程序)的执行来完成一项运算。这些指令储存在与微处理器连接的存储器里。其中算术逻辑单元(ALU)是一种处理单元,它执行所有的算术运算和逻辑运算,如加法、减法和位处理等。数据寄存器用于数据的中间处理和存储,以减少调进存储器和从存储器调出数据的数量,它也接受和传递CPU的进、出数据。地址寄存器用于储存存储器的地址,并与数据寄存器一起把输入/输出接口存储器的数据调进和调出。控制单元则控制和监督指令的正确执行。时钟或 CPU时基发生器包含在控制单元内。时钟频率决定微处理器的基本运算速度。存储器含有大量的存储单元,是储存指令和数据的部件,只读存储器(ROM)中指令被永久性地储存起来,它们只能被读出而不能被消除。随机存储器(RAM)不仅能读出信息,而且能写入(即储存)信息。数据或可变化的信息储存在 RAM里,在程序控制下的CPU可按需要读出或者更改某个RAM存储单元的存储信息。输入/输出(I/O)接口使得CPU和外界之间能进行通信,这些接口电路在CPU和外围设备之间传输数据。接口电路还能把外部数据变换成便于微机使用的形式。微机是面向总线的控制装置,系统中的各部件之间通过数据总线和控制总线传递信息。
可逆传动的微机控制
在调速精度要求不高时,可用普通测速发电机将电动机的速度转变为模拟信号,再用A/D(模拟/数字)变换器将Ufn转变为数字信号Dfn(图2)。
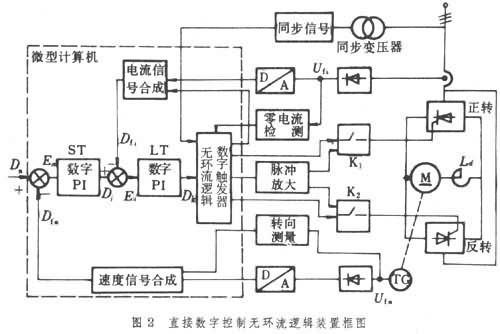
对调速精度要求较高时,可以采用速度编码器把速度值转变为电脉冲,电脉冲的频率与速度成正比,再利用f/D(频率/数字)变换器把频率转变为数字量。速度给定值Dn和速度反馈值Dfn在计算机中进行数字比较,得出数字误差信号En,然后经过数字比例积分(PI)速度调节器进行数字PI运算,其输出量即为电流数字给定值。电流反馈信号的取法是,应用常规电流检测器将负载电流转变为模拟信号Ufi,再用A/D变换器将Ufi转变为数字量Dfi,然后在计算机中将给定电流值Di和电流反馈值Dfi进行数字比较,经比较所得的电流数字误差信号Ei经数字PI电流调节器进行数字PI运算,其输出即为数字移相信号Dk。经过数字触发器把数字移相信号Dk转变为具有适当控制角α 的晶闸管触发脉冲,和常规触发器相似。为了保证触发相位和主电路电流之间的同步关系,必须设置同步电路。同步电路由同步变压器和同步信号发生器组成。由单板机输出的信号,经功放电路使触发脉冲具有足够强度。仿照模拟逻辑选触无环流系统的结构,触发脉冲经过脉冲切换电子开关K1、K2送到晶闸管的控制板上。指挥脉冲切换开关的逻辑功能(相当于模拟系统中的无环流逻辑装置的功能)是利用软件通过单板机实现的。
应当指出,A/D变换器是不带极性的,也就是它的输入模拟量只能为正,而输出的数字量也只能表示大小(代表正)。但在可逆调速系统中,由于测速发电机(SF)得到的速度反馈信号Ufn可能为正,也可能为负,为了适应A/D变换器的要求,这个信号应经过整流变为永远为正的信号。这个只表示速度大小的模拟信号经过A/D变换后,转变为只表示速度大小的数字量。为了使这个数字量能表示转速的方向,再从Ufn处取一个信号,作用到单板机内,使Dfn带上极性符号。Dfi、DK的极性变换是由计算机用软件来实现的。由上可知,在这个系统中速度设定、速度比较、速度PI调节、电流比较、电流PI调节、触发相位α 的控制、触发脉冲的分配以及无环流逻辑功能都是利用软件通过单板机实现的。
数字PI调节器
在典型的双环晶闸管直流调速系统中,速度和电流均采用比例积分(PI)调节器。由于在工程上对于连续系统的综合已有成熟的经验,所以设计离散系统的最简单方法是根据连续系统的设计方法,例如频率法、根轨迹法或其他简化后的工程设计方法,求出速度调节器和电流调节器的参数,从而得出调节器的传递函数。然后,根据传递函数写出调节器动态性能的时域表示法。再将此连续时域表达式离散化,求出相应的差分方程,作为数字调节器程序设计的基础。