[拼音]:zuixiao nenghao kongzhi xitong
[外文]:minimum energy-control systems
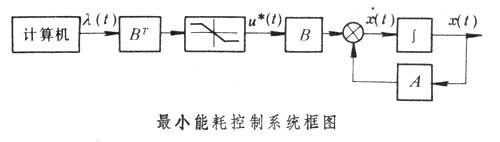
能在指定时间内以最少的能量消耗完成规定控制作用的最优控制系统。这种控制系统广泛应用于各类工程实际问题中。例如,对直流他激电机施加反向电流进行制动,要求在指定时间内把电机控制到完全停转,并使控制过程中消耗的电能为最少。这种控制问题就可采用最小能耗控制方式来实现。下图是用开环方式构成的最小能耗控制系统。计算机通过计算提供每一时刻的各个最优控制变量的函数值,经过信号放大和功率放大驱动执行机构,对被控对象以最小能耗方式进行控制。
线性被控对象的最小能耗控制问题通常采用极大值原理来求解。设被控对象的状态方程和初始状态(见状态空间法)为
夶(t)=Ax(t)+Bu(t)
x(0)=x0
式中A和B是由被控对象的结构和参数所决定的系数矩阵,x(t)是状态向量,u(t)是控制向量;控制向量u(t)的各个分量满足下面的约束:
-Mi≤ui(t)≤+Mi (i=1,2,…,m)
则使被控对象在指定时刻τ达到终态x(τ)=0,并使表示耗能值的性能指标
取极小值的最优控制向量u*(t)必须具有如下的形式:
式中λj(t)(j=1,2,…,n)是系统的协态变量。最优控制向量u*(t)是协态变量λ(t)的非线性函数(饱和特性)。在最小能耗控制系统的构成中,为了求解最优控制向量u*(t),需要在系统开始工作之前事先解出λ(t),并存入计算机。
- 参考书目
- A.P.Sage,C.C.White: Optimum Systems Control,2nd ed.,Prentice-Hall,Inc.,Englewood Cliffs, New Jersey,1977.