[拼音]:tuoluoyi
[外文]:gyroscope
具有高速转动着的旋转对称型刚体部件的仪器,又称回转仪,也称陀螺。Gyroscope一词是法国物理学家J.-B.-L.傅科提出的。1852年,他在巴黎科学院曾企图用陀螺仪测出地球的角速度,但仅取得定性结果。
构造陀螺仪的本体是一个旋转型对称刚体,其轴用特定的方法支起,可绕固定点回转。图1表示的是装在万向支架即卡登悬架上的普通陀螺仪。这种装置包括一个厚实的转子和内、外两个轻质框环。转子作为陀螺本体可绕自身轴转动(自转)。该轴的轴承装在内环上,内环轴的轴承装在外环上,而外环轴的轴承则装在机座上。内环轴既垂直于转子轴,又垂直于外环轴,且三轴相交于一点,此点称为支点。
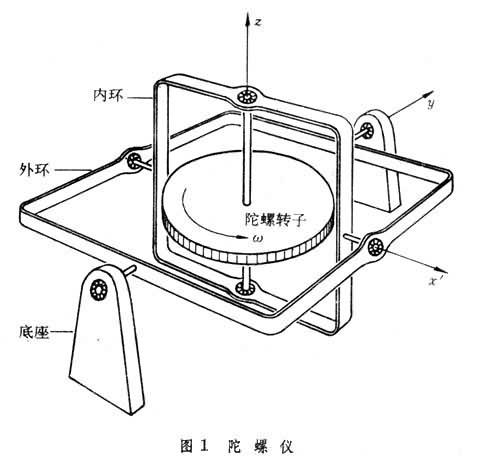
当转子的质心同悬架支点重合,重力不会产生转动力矩,这种陀螺仪称为均衡陀螺仪。如质心偏离支点,称为重力陀螺仪。
万向支架使转子成为绕支点自由转动的刚体,这种装置称为三自由度陀螺仪。它的转子可以同时绕自转轴、内环轴和外环轴作互不相关的转动。如果把外环刚性地连在固定基座上,或把内、外环刚性地连结起来,都将消除一个自由度,获得二自由度陀螺仪。另一方面,由于自转角速度在实用中是给定的常数,这个转动中的自由度可以不计。因此,有人只考虑内环轴和外环轴的自由度,而把上述两种陀螺仪分别称为双自由度陀螺仪和单自由度陀螺仪。
均衡陀螺仪的动力学特征当转子对自转轴的转动惯量为I,自转角速度为ω时,则转子的自转动量矩为L=Iω。假定支架轴承都绝对光滑,基座不能通过这些轴承把外力矩传给转子,且内、外两框环的质量可忽略不计。于是,由动量矩守恒可知,均衡陀螺仪的转子轴将能借惯性而在惯性空间保持不变方向。假如用某种方式给转子以冲击性外力矩,使动量矩L获得横向增量ΔL且ΔL《L,则新动量矩矢将偏转一个小角 。冲击还使转子轴的方向产生同一数量级的改变,但新的角速度方向已和新的动量矩方向不一致。冲击后,转子轴将紧靠新动量矩L+ΔL的方向作微幅高频的抖动(章动),其幅度与ω成反比,而频率则与ω成正比。由于ω很大,这种抖动实际上是不易察觉的,所以可认为冲击并未明显改变转子轴的方向,即高速自转均衡陀螺仪的转子轴具有抗冲击的能力,这种特性称为定轴性。但是,如果转子没有自转,那么任何微小冲击将使转子轴获得角速度,而此后将按这个方向无限制地偏离下去。
。冲击还使转子轴的方向产生同一数量级的改变,但新的角速度方向已和新的动量矩方向不一致。冲击后,转子轴将紧靠新动量矩L+ΔL的方向作微幅高频的抖动(章动),其幅度与ω成反比,而频率则与ω成正比。由于ω很大,这种抖动实际上是不易察觉的,所以可认为冲击并未明显改变转子轴的方向,即高速自转均衡陀螺仪的转子轴具有抗冲击的能力,这种特性称为定轴性。但是,如果转子没有自转,那么任何微小冲击将使转子轴获得角速度,而此后将按这个方向无限制地偏离下去。
如果沿内环轴持久地施加外力矩M,由于存在自转动量矩B>L,转子不会沿方向绕内环轴转动,而绕十字交叉轴(即外环轴)以某一角速度Ω持久地转动(旋进),如图2。
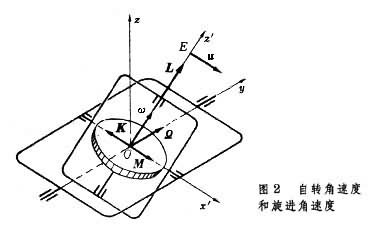
由动量矩定理可以证明,旋进角速度Ω的大小反比于自转角速度ω的大小,即

式中θ为ω和Ω的交角。
其次,由作用与反作用定律可知,转子对外力矩M的施加者有反作用力矩K=-M。这个力矩称为陀螺反抗力矩或陀螺力矩,其大小为:

方向与M相反。K是科里奥利(惯性)力的矩。陀螺仪转子还有其他惯性力矩。当旋进非匀速时,角加速度和转子对旋进轴的转动惯量的乘积冠以负号,称为单轴转动惯性力矩,它和陀螺力矩的大小属同一数量级。
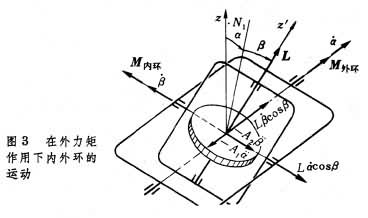
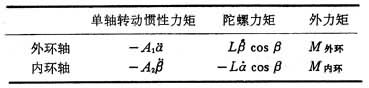
陀螺运动的近似微分方程组用A1表示转子连同内、外环一起对外环轴的转动惯量,A2表示转子连同内环对内环轴的转动惯量。α,β分别是外环和内环的转角,且β由两环互相垂直的位置(标记为N1)算起(图3。当外力矩引起的内、外环旋进角速度╠和夁都是小量,其平方项和乘积项都可忽略时,则各轴的外力矩(包括轴承中摩擦引起的力矩)和起决定性作用的惯性力矩可归纳如下表:其他惯性力矩都是╠,夁的二阶或更高阶小项,因而都可以不计。由达朗伯原理可以立即写出陀螺仪转子轴绕外环和内环旋进的近似微分方程组:
A1刕=Μ +L夁cosβ, (1)
+L夁cosβ, (1)
A2峬=Μ +(-L╠cosβ)。 (2)
+(-L╠cosβ)。 (2)
绕转子轴的自转角速度(ω+╠sinβ)由外力矩维持不变。
式(2)可以看成转子-内环组合体相对于外环的转动方程。如果外环不转,即╠=0,则A2峬=Μ 就是按牛顿定律形式直接写出的转动方程。现在由于外环转动(╠厵0)而增加了修正项(-L╠cosβ),此陀螺力矩对转子的相对运动有表观作用。可以看出,在此相对运动中,陀螺力矩有使自转轴按最短途径向旋进轴转动的趋势。
就是按牛顿定律形式直接写出的转动方程。现在由于外环转动(╠厵0)而增加了修正项(-L╠cosβ),此陀螺力矩对转子的相对运动有表观作用。可以看出,在此相对运动中,陀螺力矩有使自转轴按最短途径向旋进轴转动的趋势。
式(1)中也出现了陀螺力矩L夁cosβ。这个力矩是转子给予内环的惯性反抗,因此,对于转子-内环-外环的组合来说,就和外力矩一样(惯性力不服从作用反作用定律,转子本身不因这个陀螺力矩而又受到反作用)(见动静法)。
方程(1)和(2)也可以应用于二自由度陀螺仪,如二自由度陀螺仪是由外环固定后构成的,则在方程组中应令╠=刕=0,从而式(2)就和转子无自转时的单轴转动微分方程一样。式(1)可用来确定外力矩Μ ,它等于陀螺力矩-L夁cosβ。
,它等于陀螺力矩-L夁cosβ。
上述近似理论足以解释高速自转陀螺仪的全部动力学特性。地球作为一个陀螺,它的姿态摄动也可以由此得到说明(见刚体定点转动解法)。