[拼音]:yaokong xitong
[外文]:remote control systems
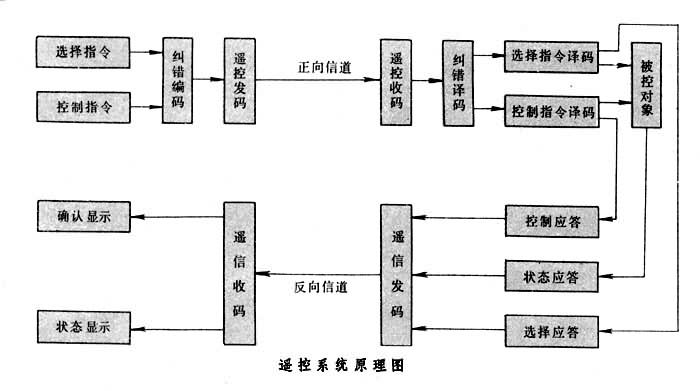
对被控对象进行远距离控制的系统,通常是遥测遥控系统的一个子系统。遥控系统一般由控制端、信道和被控端组成。遥控系统按照控制原理可以分为开环遥控系统和闭环遥控系统。大多数闭环遥控系统都是利用遥测系统作为自动控制回路的反馈环节,实际上就是遥测遥控系统。通常说的遥控系统都是指令遥控系统。这种遥控系统的特点,就是控制端利用有线或无线的方式将遥控指令传输到被控端,使被控对象执行控制端要求的操作。指令遥控系统的主要问题是遥控指令码型的选择和传输可靠性等问题。附图为典型的遥控系统的工作原理图。
遥控系统的操作方式按系统的要求和完成任务的不同,分为一次动作型、二次动作型和三次动作型。对1:1方式的遥控系统进行操作时,首先要选择控制点(即地址)。例如确定要控制的是哪一个阀门,然后再进行功能操作,例如开或关的操作。这两个操作放在一个动作中去完成,就称为一次动作型。一次动作型遥控在完成选址任务后即发出一个遥控指令,使被控对象执行动作。一次动作型具有操作程序少,操作时间短,设备简单等优点,但误操作概率大,可靠性差。如果首先进行选址操作,被控端收到选址指令后通过反向通道发出一个应答信号,控制端根据应答信号来判断选址是否正确。如果确认选址是正确的,便可进行功能操作,如果确认选址是错误的,可以发出取消选址的指令。这种确认选址操作后再进行功能操作的方式,称为二次动作型。二次动作型操作程序多,时间长,设备也较复杂,但它具有准确、可靠的优点。现代遥控系统几乎都是采用二次动作型的操作方式。对1:N 方式的遥控系统进行操作时,首先要进行群选择(即被控端的选择)。被控端收到群选择指令后,通过反向通道,发出一个应答信号。如果控制端确认群选择正确,就发出地址选择码。被控端收到地址选择码后,再通过反向通道,发出应答信号。如果控制端确认地址选择正确,就可以进行功能操作,使被控对象动作。在被控对象动作后,再通过反向通道将被控对象的状态信息发送到控制端,作为下一步控制的依据。这种操作方式称为三次动作型。
在实际工作中遥控系统还可以分为实时工作方式和循环工作方式,循环遥控系统属于时分制遥控系统。