[拼音]:fenli yuanli
[外文]:separation principle
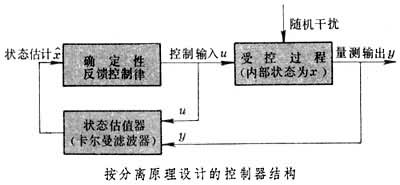
把随机控制系统的控制器分解成状态估计和确定性反馈控制两部分分别进行设计的一种原理。应用这个原理时,先根据随机观测数据估计系统的状态,再把估计值看作为真实状态,按照确定性系统设计最优控制规律。这是对随机最优控制系统设计技术的一种简化。这样设计出来的系统常常不是真正最优的。只有对某些特定类型的系统,可按分离原理设计出最优的随机控制策略。这类系统称为可分离系统。线性二次型高斯 (LQG)随机过程控制问题就属于这一类,它的求解和实现都比较容易,有较大的实用意义。下图为按分离原理设计的控制器结构。状态估值器可采用卡尔曼滤波器来实现(见卡尔曼-布什滤波),它给出受控过程内部状态x的最优估计值憫。而后用憫的信息按确定性的反馈律给出控制и 的值,и =L憫。
对可分离性的概念进行更深入的研究,还可导出中立性和确定性等价两个概念。中立性条件只说明在设计反馈控制律时不必顾及它对估计精度的影响,这个条件较可分离性条件为弱。确定性等价条件则比可分离性更强,它要求由憫到и 的反馈控制律与随机干扰为零时得到的确定性系统的最优控制律完全一致。在确定性等价条件满足时,设计过程可进一步简化。