[拼音]:tongbu ceju quanqiu dingwei xitong
[外文]:global positioning system with synchroranging
一种正在趋于成熟的先进军用卫星导航定位系统,简称全球定位系统 (GPS)。60年代“子午仪”卫星导航系统研制成功以后,美国继续研究更先进的军用卫星导航系统。1973年开始研究全球定位系统,工程研究试制阶段接近结束,预计80年代后期开始部署使用,用以满足军事上的需要。原计划在3个轨道平面上共部署 24颗卫星,在最佳状态下可达到10米左右三维准确度(全球范围)。后来改为在6个轨道平面上共部署18颗卫星,定位能力有所降低。
系统构成
全球定位系统包括地面控制部分、空间部分和用户部分。
(1)地面控制部分:由一个主控站、一个地面控制站和若干相互远离的监测站组成。监测站配有接收机、铯钟和覆盖上半天球的天线,能无源跟踪视界内的所有卫星,从收到的每颗卫星信号中测得单程距离。然后,将测得值与环境数据一起发往主控站。主控站对收到的数据进行处理,得到轨道数据和钟差,由此产生星历。主控站用铯钟组保持全球定位系统时,必要时能调整星钟时间相位和频率。地面控制站每天向每颗卫星输送一次主控站提供的电文,其中包括星历、钟差和传播延迟数据。数据装入卫星上存储器,用以更换旧数据,并调制在每颗卫星发射的两个载频上。
(2)空间部分:卫星在 20183公里高的圆轨道上运行,运行周期为12小时。轨道对赤道倾斜55°。6个轨道平面上各均匀分布 3颗卫星,轨道升交点相互间隔60°。卫星上除装有遥控、遥测、收发天线等一般卫星所必备的分系统外,还装有高稳定度的原子钟和导航分系统。超稳定原子钟是全球定位系统的核心。每颗卫星自身直接产生超稳定导航同步信号,初期使用铷频标,同时研制更稳定的铯频标。卫星上铯频标的长期稳定度预期达到每300万年不差1秒。
(3)用户部分:用户接收设备中用来接收处理卫星导航同步信号的晶体振荡器,类似于现代数字手表中的石英振荡器,具有极佳的短期稳定度。它与原子频标结合使用时,足以提供全球定位系统定位准确度所需要的精确时间基准。但用户钟差须用解算测伪距联立方程解决。星历跟踪和预测是全球定位系统工作的基本依据。用户凭借星历跟踪和预测,测量距离和计算所在位置。全球定位系统采用了频谱扩展技术。在用户接收机中,卫星选择信号处理、本地码产生和定位计算等均靠微处理器完成。
导航信号的产生和构成
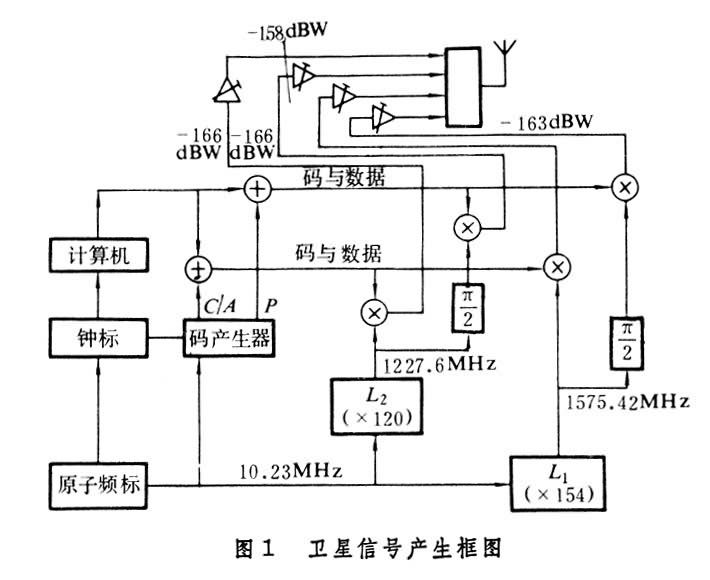
卫星把来自星钟的 10.23兆赫频率作为基准。这个基准频率推动钟标、码产生器,乘120次得到载频L2(1227.6兆赫),乘 154次得到 L1(1575.42兆赫)。钟标控制计算机产生轨道数据。码产生器产生P码和 C/A码。P码与轨道数据一起分别调制在经90°移相的L2和L1上,由天线发射。C/A码与轨道数据分别直接调制在L2和L1上,由天线发射(图1)。P码是最精确的伪随机噪声码,每7天重复一次,当接收设备没有对应码模时就很难跟踪和锁定。C/A码是粗获取码,每毫秒重复一次,提供的定位准确度较差。导航电文中含有交接词(HOW),专门用来把C/A码转换为 P码。全球定位系统的电文使用规定的数据结构,每1500比特为1帧,分为5个300比特的副帧,每个副帧再分为10个30比特的词。每个词含有24个信息比特和 6个奇偶校验比特(图2)。
。然后准确测量信号到达时间和<a href='http://www.baiven.com/baike/224/277204.html' target='_blank' style='color:#136ec2'>多普勒</a>频移。可用几个跟踪环连续测量各颗卫星,或用一个环顺序反复测量各颗卫星。随后对导航电文<a href='http://www.baiven.com/baike/223/313336.html' target='_blank' style='color:#136ec2'>解调</a>,从副框架集成完整电文,并通过制入奇偶校验比特进行校正。卫星星历经译码后计算卫星的位置和速度,然后将卫星位置、速度、信号到达时间与多普勒频移合起来算出用户位置、速度,以及与用户钟的时间差和频差。解算3个位置坐标须用4颗卫星信号的到达时间和接收机钟差。接收机可与其他导航传感器组合。由于用户对功能要求不同,在设计上有较大的变动范围。高性能飞机要求389.jpg)
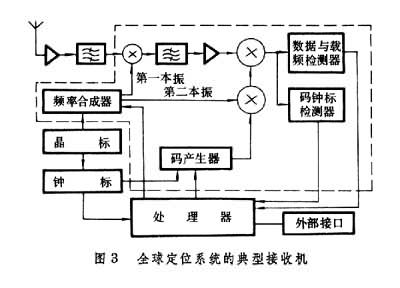
接收机设计
接收机的功能是:首先由处理器确定4颗待用的位置最佳的卫星,其次从频率在强干扰环境中保持高定位准确度,需要使用4个通道同时跟踪4颗卫星。航海和航空的民用用户使用单通道接收机,并只用C/A码顺次测量就能满足需要。
组合使用
全球定位系统与推算系统组合工作,如与惯性导航系统组合最为有利,两者可以互相补充。惯性导航在载体短期运动急剧变化时仍能提供准确信息。惯性导航的速度输出又可支持全球定位系统接收机的码跟踪和载频跟踪环,可使接收机使用很窄的跟踪环带宽。这样,在低信噪比条件下仍可连续工作和对抗强的干扰。另一方面,全球定位系统在平稳运动条件和良好信噪比环境中提供的位置、速度、伪距和距离变化率,又有助于调整和修正惯性导航数据。惯性导航在长期漂移中所产生的误差,通常可用全球定位系统测得的数据不断估算和更新。
组合系统导航滤波器既可装入全球定位系统接收机的处理器中,也可装入惯性导航的处理器中。所有导航计算均可在一个处理器中进行。但用多个滤波器分散处理多个传感器的输入时,载体上各个导航系统都能单独工作。