[拼音]:jiaohui he duijie
[外文]:rendezvous and docking
使两个或两个以上的航天器在轨道上预定的位置和时间相会合并在结构上连接起来的过程。交会和对接涉及航天器轨道控制和航天器姿态控制,主要由航天器控制系统完成。
发展概况
1965年12月15日,在航天员参与下“双子星座”7号和“双子星座”6号(见“双子星座”号飞船)在同一轨道上以同一速度飞行,有时相距仅10厘米左右,实现了世界上第一次空间交会。1968年10月26日苏联“联盟”2号和“联盟”3号(见“联盟”号飞船)成功地实现了空间轨道自动交会。1969年7月16~24日“阿波罗”11号(见“阿波罗”工程)成功地实现了人类第一次月球着陆。登月舱与指挥舱在月球轨道上实现了交会和对接。1975年“联盟”号飞船与“阿波罗”号飞船的对接成功表明:从两个不同场地发射的航天器也能实现交会(图1 )。1984年“挑战者”号航天飞机成功地修复了在地球轨道上已经失效的卫星,标志着航天器交会和对接技术进入了新的发展阶段。

交会
一个航天器与另一个航天器在同一时间、以相同速度到达空间同一位置的过程。轨道上交会的过程分为三个阶段:远程导引阶段、近程导引阶段和停靠阶段。
(1)远程导引阶段:控制受控航天器的质心运动,将它导引到将要对接的目标航天器附近。这时两个航天器的距离小于 100公里。受控航天器接近对接目标有两种方案:直接从发射轨道接近目标和从停泊轨道接近目标。第一种接近方案的前提是精确的发射准备并对发射时间(发射窗口)有严格的要求。否则受控航天器就不能进入目标航天器的轨道,两者的飞行方向也不能在同一平面内。若采用变方位发射技术,则既可加大发射窗口又可使受控航天器进入计算的对接轨道。第二种接近方案中,要先把受控航天器导引到停泊轨道(一般选取与目标轨道共面的圆轨道),然后在适当的时刻进行定向机动和轨道变换。轨道变换可采用霍曼变轨(见霍曼轨道)和双椭圆变轨方法。远程导引阶段的基本要求是保证对接时间和导引精度,并且燃料消耗最少。
(2)近程导引阶段:利用受控航天器上的导航设备把受控航天器引入交会区。近程导引有两种方法。第一种是轨道导引法。采用这种导引方法时必须先知道目标的轨道参数,并在受控航天器上带有确定自身与目标相对运动参数的设备和计算机。这种导引可用脉冲控制或持续控制方式实现。双脉冲方法最简单,而且燃料消耗少,但导引误差较大。而持续控制,如最佳导引控制则精度较高。最佳性能指标一般是在燃料消耗最少、导引过程最快和导引精度最高之间折衷选定。第二种是自主导引法。这种方法能够在不知道对接目标的轨道参数的情况下,用比较简单的设备完成近程导引。常用的自主导引方法有直接导引法、前置点法和平行接近法。第二种导引方法虽然燃料消耗比第一种方法多,但是简单可靠。
(3)停靠阶段:受控航天器以零或接近于零的相对速度靠近对接目标。当两个航天器相对距离为 30~300米时,以1.5~3米/秒的相对速度进入停靠阶段。停靠控制采用小推力发动机,常使用6个发动机。它们装在航天器的三个相互垂直的坐标轴上,能在任何方向上产生控制加速度。在停靠过程中,航天器姿态控制系统应当保持两个对接航天器的相对姿态,以满足停靠和对接时的要求。
对接
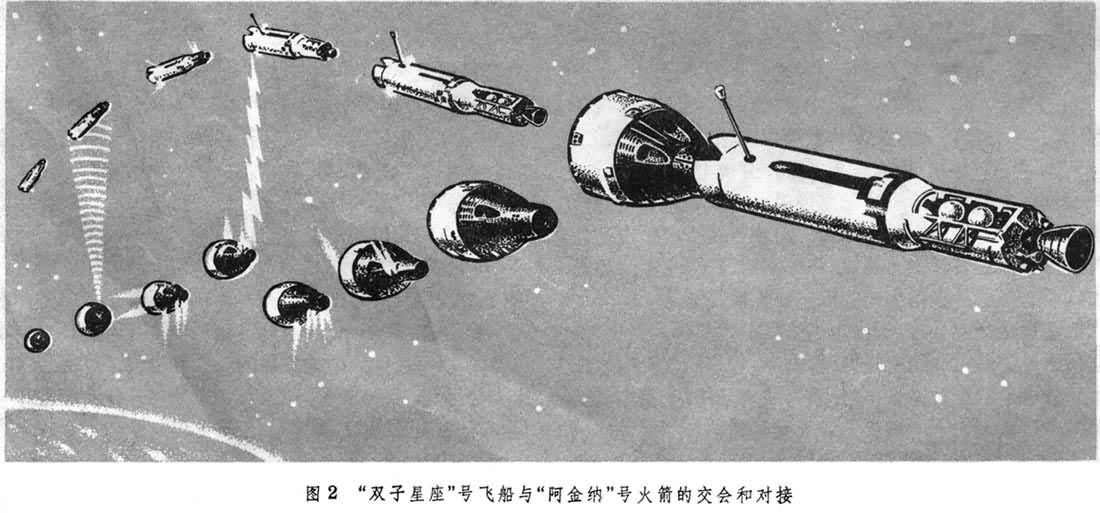
通过专门的对接装置使受控航天器与对接目标相互接触,并通过对接机构把二者连接成为一个整体。对接通常都是在航天员的指挥和操纵下进行的。例如“双子星座”号飞船与“阿金纳”号火箭的对接过程(图2),当两者相距300米左右、相对速度为1.5~3米/秒时,航天员调整飞船通过手控完成对接,随后“阿金纳”号火箭的对接环与飞船的小头紧密配合,连成一个整体。这个对接机构吸收冲击负荷的能力大约为0.5米/秒。(参见彩图)