[拼音]:shuixia jiqiren
[外文]:under water robot
一种工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称潜水器。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。
简况1934年,美国研制出下潜934米的载人潜水器。1953年又研制出无人有缆遥控潜水器。其后的发展大致经历了三个阶段。从1953年至1974年为第一阶段,主要进行潜水器的研制和早期的开发工作。先后研制出20多艘潜水器。其中美国的CURV系统在西班牙海成功地回收一枚氢弹,引起世界各国的重视。1975至1985年是遥控潜水器大发展时期。海洋石油和天然气开发的需要,推动了潜水器理论和应用的研究,潜水器的数量和种类都有显著地增长。载人潜水器和无人遥控潜水器(包括有缆遥控潜水器、水底爬行潜水器、拖航潜水器、无缆潜水器)在海洋调查、海洋石油开发、救捞等方面发挥了较大的作用。1985年,潜水器又进入一个新的发展时期。80年代以来,中国也开展了水下机器人的研究和开发,研制出“海人”1号(HR-1)水下机器人,成功地进行水下实验。(见彩图)

 系统的结构与功能
系统的结构与功能
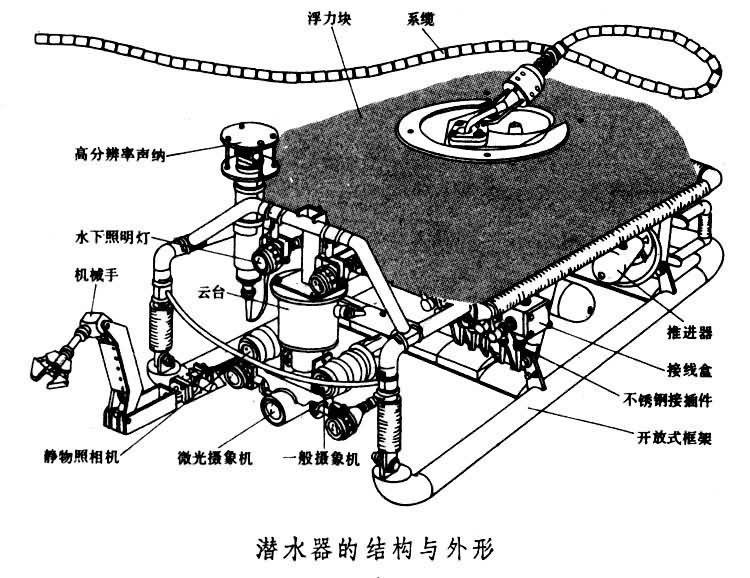
典型的遥控潜水器是由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。潜水器本体(见图)在水下靠推进器运动,本体上装有观测设备(摄像机、照相机、照明灯等)和作业设备(机械手、切割器、清洗器等)。潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视。靠电缆向本体提供动力和交换信息。中继器可减少电缆对本体运动的干扰。新型潜水器从简单的遥控式向监控式发展,即由母舰计算机和潜水器本体计算机实行递阶控制,它能对观测信息进行加工,建立环境和内部状态模型。操作人员通过人机交互系统以面向过程的抽象符号或语言下达命令,并接受经计算机加工处理的信息,对潜水器的运行和动作过程进行监视并排除故障。近年来开始研制智能水下机器人系统。操作人员仅下达总任务,机器人就能根据识别和分析环境,自动规划行动、回避障碍、自主地完成指定任务。