[拼音]:pinlü xiangying
[外文]:frequency response
系统对正弦信号的稳态响应特性。稳态是系统的运动在过渡过程结束后的状态。系统的频率响应由幅频特性和相频特性组成。幅频特性表示增益的增减同信号频率的关系;相频特性表示不同信号频率下的相位畸变关系。根据频率响应可以比较直观地评价系统复现信号的能力和过滤噪声的特性。在控制理论中,根据频率响应可以比较方便地分析系统的稳定性和其他运动特性。频率响应的概念在系统设计中也很重要。引入适当形式的校正装置(见控制系统校正方法)可以调整频率响应的特性,使系统的性能得到改善。建立在频率响应基础上的分析和设计方法,称为频率响应法。它是经典控制理论的基本方法之一。
确定频率响应的方法常用的确定频率响应的方法有分析法和实验法两种。
(1)分析法 基于物理机理的理论计算方法,只适用于系统结构组成易于确定的情况。在系统的结构组成给定后,运用相应的物理定律,通过推导和计算即可定出系统的频率响应。分析的正确程度取决于对系统结构了解的精确程度。对于复杂系统,分析法的计算工作量很大。
(2)实验法 采用仪表直接量测的方法,可用于系统结构难以确定的情况。常用的实验方式是以正弦信号作为试验信号,在所考察的频率范围内选择若干个频率值,分别测量各个频率下输入和稳态输出正弦信号的振幅和相角值。输出与输入的振幅比值随频率的变化特性是幅频特性,输出与输入的相角差值随频率的变化特性是相频特性。
频率响应图在采用频率响应法分析和设计控制系统时,常以频率响应的曲线图作为研究问题的出发点。频率响应图的主要形式有奈奎斯特图、波德图和尼科尔斯图。
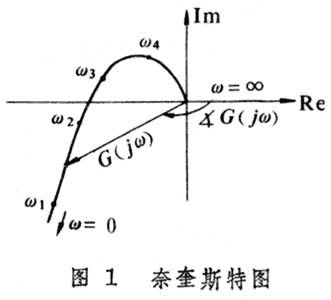
(1)奈奎斯特图 又称极坐标图。它是当频率ω 由零变化到无穷大时,表示在极坐标上的频率响应 G(jω)的幅值 |G(jω)|与相角庺G(jω)的一条关系曲线(图1)。极坐标图的优点是,频率响应曲线上能显示出频率ω 的分布情况。为了绘制极坐标图,必须对选定的每个ω 值计算出相应的G(jω)的幅值|G(jω)|和相角庺G(jω);由|G(jω)|和庺G(jω)可构成极坐标图上的一个矢量G(jω)。奈奎斯特图就是当ω由零变化到无穷大时矢量G(jω)终端扫描得到的一条轨迹。
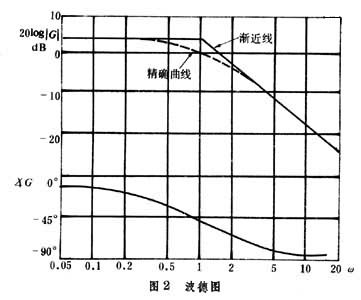
(2)波德图 又称对数坐标图。波德图由频率响应G(jω)的对数幅值特性图和相角特性图组成(图2)。在对数幅值特性图中,频率轴采用对数分度;幅值轴取为20log|G(jω)|,单位为分贝(dB),采用线性分度。在相角特性图中,频率轴也采用对数分度;角度轴是线性分度,单位为度。波德图的优点是可将幅值相乘转化为对数幅值相加,而且在只需要频率响应的粗略信息时常可归结为绘制由直线段组成的渐近特性线,作图非常简便。如果需要精确曲线,则可在渐近线的基础上进行修正,绘制也比较简单。
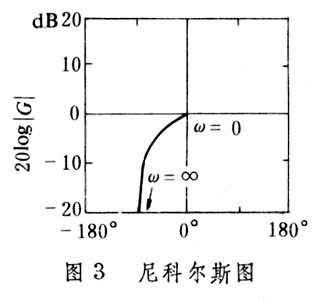
(3)尼科尔斯图 又称对数幅相图。它是在直角坐标上以频率ω为参量表示的对数幅值20 log|G(jω)|与相角庺G(jω)的一种关系图(图3)。对数幅相图很容易根据波德图上的对数幅值特性和相角特性来绘制。尼科尔斯图的优点是能较容易地确定控制系统的相对稳定性。
评价系统的过渡过程性能系统的过渡过程与频率响应有着确定的关系,可用数学方法来求出。但是除一阶和二阶系统外,这样做常需要很多时间,而且在很多情况下实际意义不大。常用的方法是根据频率响应的特征量来直接估计系统过渡过程的性能。频率响应的主要特征量有:增益裕量和相角裕量、谐振峰值和谐振频率、带宽和截止频率。
(1)增益裕量和相角裕量 它可提供控制系统是否稳定和具有多大稳定裕量的信息。
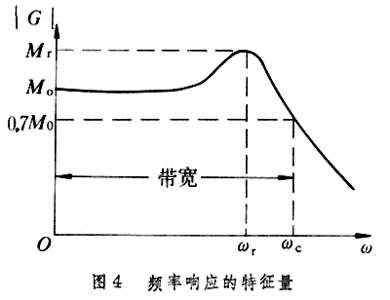
(2)谐振峰值Mr和谐振频率ωr Mr和 ωr规定为幅频特性|G(jω)|的最大值和相应的频率值(图4)。对于具有一对共轭复数主导极点(见根轨迹法)的高阶线性定常系统,当Mr值在(1.0~1.4)M0范围内时,可获得比较满意的过渡过程性能。其中M0是ω=0时频率响应的幅值。ωr的大小表征过渡过程的快速性:ωr值越大,系统在单位阶跃作用下输出响应的快速性越好。
(3)带宽和截止频率 截止频率 ωc 规定为幅频特性|G(jω)|达到0.7M0并继续下降时的临界频率(图4)。对应的频率范围0≤ω ≤ωc称为带宽。截止频率的含义是:系统对频率高于ωc的信号分量具有过滤的功能,而频率低于ωc的信号分量则可直接通过或略有衰减。从复现输入信号的角度来说,常要求带宽大一些,它相应于较小的上升时间和较快的响应速度。但从抑制高频噪声的角度来看,则带宽不宜太大。因此确定带宽需要全面考虑。