[拼音]:xiangkongzhen leida
[外文]:phased array radar
采用相控阵天线的雷达。与依靠改变天线口径瞄准方向以改变波束指向的机械扫描雷达不同,相控阵雷达是一种电子扫描雷达,即由大量辐射器组成的相控阵天线的波束进行扫描时天线口径是不动的,而是通过数字电子技术改变各辐射器的相位,使波束指向在数十微秒内变换到天线搜索范围内的任意方向。相控阵雷达波束的电子式扫描,实质上是相控扫描,它具有机械扫描雷达无法实现的灵活性和数据率。一部相控阵雷达,可以完成多部不同功能的机械扫描雷达的任务。波束按方位、仰角两维相控扫描的相控阵雷达设备复杂而且成本很高;方位机械旋转扫描、仰角相控扫描的雷达比较简单一些,但仍不能完全克服机械扫描雷达的弱点。
发展概况
40年代就有用机械方法改变辐射器之间相位差以实现波束扫描的雷达。较早的一种是利用机械旋转移相器,使波束在方位29°范围内每秒扫描10次,但波束扫描只能顺序进行,速度和灵活性与移动馈源进行扫描的方法相差无几。50年代后期,因机械扫描雷达不能满足洲际导弹防御的需要,人们开始研制现代相控阵雷达。1960年,试验性的分米波段相控阵雷达问世。1968年,美国高功率大型超高频相控阵雷达AN/FPS-85建成运行,其作用距离达6000~7000公里,它能检测、跟踪、识别地球轨道目标和弹道导弹。在战略防御方面,相控阵雷达比机械扫描雷达经济实用。60年代后期出现了收、发天线阵合而为一的相控阵雷达。70年代研制成功全固态组件的巨型预警相控阵雷达和瞬时带宽达 200兆赫、可进行目标成像的导弹靶场测量相控阵雷达。在战术防御方面,出现了车载、舰载的由相控阵雷达组成的对空防御系统、机载多功能相控阵雷达、方位机械旋转和仰角相位扫描的三坐标雷达。中国在70年代已研制出方位、仰角两维相位扫描的雷达。
工作原理
相控阵雷达由各基本单元组成(图1),
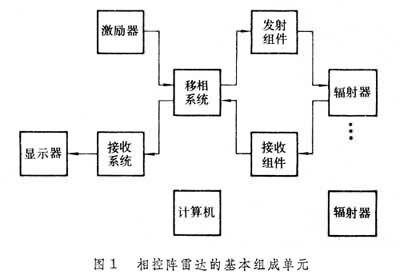
其特点是具有移相系统,并且计算机与各主要部分相连。
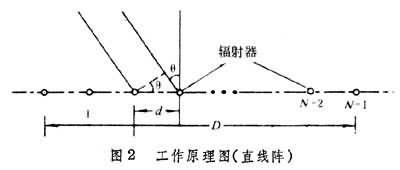
发射时,各辐射器辐射的信号到达目标时同相,信号同相叠加,波束的最大值指向目标方向;接收时各辐射器收到的信号同相合成。在直线阵(图2)中辐射器的间距为d,在偏离法线θ角的方向,相邻辐射器间的电磁波行程差为d sinθ,相位差为 (λ为发射信号的波长)。欲使波束指向θ方向,各辐射器应设置延迟器或移相器,以抵消上述之行程差或相位差而使之同相。
(λ为发射信号的波长)。欲使波束指向θ方向,各辐射器应设置延迟器或移相器,以抵消上述之行程差或相位差而使之同相。
特性
波束的指向可以瞬时变换,可针对目标性质和分布控制波束扫描和停留时间,使时间和能量的利用率比机械扫描雷达大为提高,从而完成更多的任务。相控阵系统的反应速度快,适于对付多批快速机动的目标。
计算机为相控阵雷达的组成部分。它的用途是对技术性能(发射信号波形和能量、信号和数据处理参数、波束指向和扫描速度等)和工作方式(搜索、截获、跟踪等)进行程序化控制和自动化管理,并按目标环境自适应地选择工作方式和技术参数。一部相控阵雷达可同时完成多种功能,如对多目标搜索、跟踪、制导、再截获,杀伤效果鉴定,无源探测等。雷达功能的变换可通过改变软件来实现。
相控阵雷达可设计成每个辐射器有单独的接收、发射组件,系统可靠性较高,即使个别组件损坏基本上也不影响系统性能。此外,天线固定,容易对雷达结构进行加固,因而抗爆炸能力比天线转动的雷达为强。
但是,实际使用的平面天线阵的最大扫描角为±45°~±60°,当监视方位为360°时则需要 3~4个天线阵。与机械扫描雷达相比,相控阵雷达的复杂性和成本都较高。
用途
相控阵雷达具有多功能、高数据率、多目标处理能力,可完成机械扫描雷达不能完成或需要多种机械扫描雷达才能完成的特殊军事任务。例如,监视远程弹道导弹和外空目标的预警雷达;对飞机、导弹进行搜索和跟踪、并对防空导弹制导的地-空防御系统;监视炮弹的弹道和落点,推算炮位的炮火监视雷达;导弹靶场测量多弹头和诱饵的测量雷达;飞机着陆系统的地面雷达;机载多功能(搜索、跟踪、地物回避、导航、测绘等)雷达等。波束在方位上采用机械扫描、在仰角上采用相控扫描的体制,主要用于航管和防空的三坐标引导雷达。
数字式移相器
二进制步进式移相器比连续可变式移相器简单实用,移相精度取决于移相器的位数。使用P位移相器时移相值应各为π/2n弧度(式中n=0,1,2,…,p-1)。大多数相控阵雷达用3位或4位移相器,用PIN二极管(见微波二极管)作为电控开关,用带状线电路作为移相元件的移相器使用较广。但波长在 5厘米以内的高功率时多采用铁氧体移相器。数字式移相器不能精确抵消相位差值 ,最大化误差为π/2p。使用3位移相器时,天线增益损失仅0.23分贝,而最大量化天线旁瓣约 -18分贝。采用各辐射器间相位量化误差不相关的方法能降低最大量化旁瓣值。
,最大化误差为π/2p。使用3位移相器时,天线增益损失仅0.23分贝,而最大量化天线旁瓣约 -18分贝。采用各辐射器间相位量化误差不相关的方法能降低最大量化旁瓣值。
阵的瞬时带宽
瞬时带宽是衡量不失真地发射或接收宽带信号的能力的指标。图2中,左端和右端辐射器间电磁波传播时延差为 ,c为光速。对于宽带,这些辐射器的信号在合成时的不重叠效应不容忽略。如允许左端与右端辐射器的信号在2/B的时间里不重叠(B为信号带宽),则信号带宽B≤θ0f/128sinθ,式中θ0为波束3分贝点宽度(度),f为发射载频(赫)。超过上式带宽时则须采用二进制数字式延迟线补偿行程差。最小位的延迟为一个波长,位数由D sinθ/λ 确定。延迟器件为稳定、低耗、无色散的电缆或带状线,利用以 TEM模工作的铁氧体或二极管作为延迟转换开关。距离分辨力良好的目标成像雷达或抗宽带干扰的雷达,均要求大的瞬时带宽。
,c为光速。对于宽带,这些辐射器的信号在合成时的不重叠效应不容忽略。如允许左端与右端辐射器的信号在2/B的时间里不重叠(B为信号带宽),则信号带宽B≤θ0f/128sinθ,式中θ0为波束3分贝点宽度(度),f为发射载频(赫)。超过上式带宽时则须采用二进制数字式延迟线补偿行程差。最小位的延迟为一个波长,位数由D sinθ/λ 确定。延迟器件为稳定、低耗、无色散的电缆或带状线,利用以 TEM模工作的铁氧体或二极管作为延迟转换开关。距离分辨力良好的目标成像雷达或抗宽带干扰的雷达,均要求大的瞬时带宽。
- 参考书目
- P.J.Kahrilas,Electronic Scanning Radar Systems Design Handbook, Artech House,Dedham,1976.
- M.I. Skolnik,Introduction to Radar Systems,2nd ed.,McGraw-Hill,New York,1980.