[拼音]:shiying kongzhi xitong
[外文]:adaptive control systems
能在系统和环境的信息不完备的情况下改变自身特性来保持良好工作品质的控制系统,又称自适应控制系统。信息不完备表现为系统和环境的特性或其变化规律的不确定性。适应控制系统中采用有目的的搜索和试探等方法,通过对环境不断进行观测和对已有控制品质进行评价和分析,在采集和加工信息的基础上学习和改进关于环境特性的知识,减小不确定性,进而模仿工程师的设计过程,自动地调整系统的结构或参数,达到改善系统品质的目标。在大多数情况下,自适应过程必须依靠计算机来完成。适应性是生物机体的基本特性之一(见适应)。无论是生物个体还是整个物种,都是依靠适应性在长期进化过程中逐渐形成各种灵活、完善的控制功能的。生物的适应性可成为建立适应控制系统的原理和各种方法的借鉴。
20世纪50年代初产生的自寻最优系统和用巧妙反馈方式使系统能在较广范围内正常工作的条件反馈系统,是建造适应控制系统的最初尝试。1958年前后设计成飞机自动驾驶仪的模型参考适应控制系统,这种系统能在空气动力特性变化很大的情形下正常工作。R.E.卡尔曼提出的不断进行最小二乘递推估计并按此估计值修改控制器参数的自动最优化控制系统和R.贝尔曼从动态规划观点提出的多步决策适应过程的一般数学模型,提出了建立适应控制系统的基本原理和可能途径。到70年代,由于计算机的普遍使用和自动控制理论的进步,适应控制技术遂得到很大发展。微处理机的问世又推动了适应控制系统开始得到较为广泛的应用。适应控制系统的主要类型有:自校正调节器、模型参考适应控制系统、自镇定系统、自寻最优系统、自组织系统和学习控制系统等。
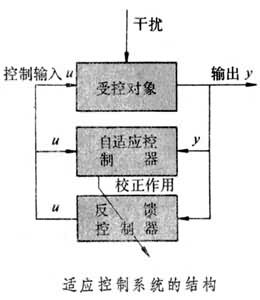
图中画出适应控制系统的结构。它比普通的反馈控制系统增加了一个适应控制回路。适应控制器根据受控对象的输入输出关系来辨识(见系统辨识)受控对象和外部干扰的特性,随后根据辨识的结果校正反馈控制规律,以适应环境特性的变化。无论辨识还是控制规律的设计,都可采用不同的方法。它们的不同组合能形成适应控制的不同方案。当系统的环境特性及其变化可以用一些参数来描述时,就可对这些参数进行辨识并使反馈控制规律跟踪这些参数的变化。这种系统称为参数适应控制系统。对于复杂的情况,常常只能用一些笼统的数量指标来反映控制过程的品质,并以品质的优劣作为校正控制规律的依据,这就是品质适应控制系统。对控制规律进行的校正也有多种方式。可从根本上改变控制器的结构(由一种结构改换到另一种结构)的控制系统,称为变结构系统。只改变控制器的一些参数(如放大倍数)的方式,称为参数校正式系统。如果利用校正作用直接去影响控制信号的大小,则称为信号综合式系统。
按照适应控制原理设计的控制系统常常会出现失稳或参数发散的现象,这使人们认识到稳定性是适应控制系统的重要研究课题。对于适应控制系统,即使受控对象是线性定常系统,它的闭环控制系统也是变系数或带有随机干扰的非线性系统,很难由一般分析方法给出稳定性判据。但是,有相当多的适应控制系统的稳定性问题,可以用李雅普诺夫稳定性理论和波波夫超稳定性理论来研究。模型参考适应控制系统和自校正适应控制系统实质上是一致的,它们的稳定性分析方法也相互适用。在稳定性分析的过程中还能附带给出一些关于参数选择的信息。李雅普诺夫稳定性理论和超稳定性理论的主要缺点,在于它们要求对系统的模型有十分精确的知识。系统参数的变化可能使整个控制系统失去稳定性。这就推动了对适应控制系统的鲁棒性的研究。由于还没有一般的判据,在实际使用适应控制系统时,往往主要借助于人工智能技术来积累经验或进行逻辑判断。
自适应控制系统已在船舶驾驶、过程控制等方面取得了一些成功的应用。由于理论还不够完善,一般在完成设计后还需要用仿真技术进行最后的校验。
- 参考书目
- R.Bellman,Adaptive Control Processes:A Guided Tour,Princeton Univ. Press,Princeton, New Jersey,1961.
- Landau I.D.,Adaptive Control: the Model Reference Approach, Macrcel Dekker Inc., New York,1979.