[拼音]:cifu diandongji
[外文]:servomotor
用作自动控制装置中执行元件的微特电机。又称执行电动机。其功能是将电信号转换成转轴的角位移或角速度。
伺服电动机分交、直流两类。为了使负载能够在所要求的速度、加速度及张力范围内运动,伺服电动机不仅要满足一定的静态指标,如有足够的功率、转矩等,还应满足一定的动态指标,如快速响应、灵敏度和可控性等。
伺服电动机的负载可以是惯性负载、摩擦负载,也可以是外加阻力矩或是它们的任何组合。电动机与负载在性质和联接方式(如减速装置、联动装置)上均不同,它们的时间响应和相互影响程度也不同,因此,电动机和负载必须一起考虑。
整个控制系统的动特性通常主要决定于电动机和负载的特性。在有些控制机构中,负载可以忽略不计,这时控制系统的动特性主要与电动机有关,这种控制系统通常称为仪表伺服系统。
 交流伺服电动机
交流伺服电动机
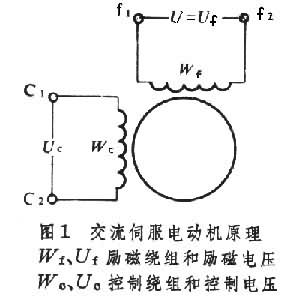
其作用原理与交流感应电动机(见异步电动机)相同,如图1所示。在定子上有两个相空间位移 90°电角度的励磁绕组Wf和控制绕组Wc。励磁绕组Wf接一恒定交流电压,利用施加到控制绕组Wc上的交流电压或相位的变化,达到控制电动机运行的目的。
交流伺服电动机常用的转子结构有笼式和非磁性杯形。笼式转子与感应电动机的笼式转子结构相似,但较之细长,其励磁电流较小,功耗低,体积较小,机械强度较高。广泛应用于交流控制系统。非磁性杯形转子是用非磁性金属如铝、紫铜等制成。这种转子惯量小,运行平稳,噪声小,灵敏度高,主要用于一些要求运行平滑的系统。
交流伺服电动机的主要特点如下。
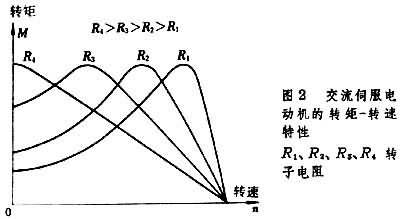
(1)运行稳定。交流伺服电动机与一般异步电动机相比,具有更大的转子电阻,它的机械特性的斜率都是负值,如图2中R4曲线。转速随转矩的增加而均匀下降,因此,可在n为0~n0(空载转速)之间稳定运行。这样的机械特性决定了电机的效率较低。
(2)可控性好。两相交流伺服电动机机械特性的斜率为负值,在单相供电时,转矩和转速符号相反,因此,当单相励磁时,电机不会发生自转现象,即控制信号一旦消失,电机立即停转。
(3)快速响应。控制绕组接到控制信号后,能快速起动,信号消失后,又立即自行制动、停转。一般用机械的和电的两个时间常数来表征。时间常数小,快速响应良好。要求电动机具有高堵转转矩、小的转子惯量及电感和电阻比值。
(4)灵敏度高。电机具有小的起动电压。起动电压指的是额定励磁电压下,加于控制绕组以使电机开始连续转动的最小电压。起动电压愈小,则灵敏度愈高,系统的不灵敏区愈小。一般起动电压应小于额定电压的3~4%。
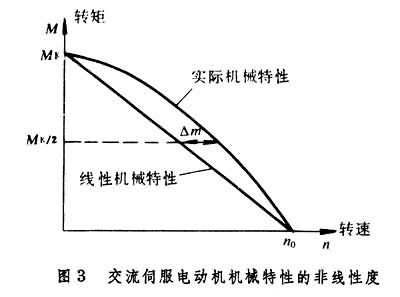
(5)机械特性和调节特性的非线性度指标严格。机械特性的非线性度 Km是指在额定励磁电压下, 对任意控制电压时的实际机械特性与线性机械特性在转矩M 等于Mk/2时的转速差Δn(图3)与空载转速n0之比的百分数,即Km=Δn/n0×100%。Km要求小于10~15%。
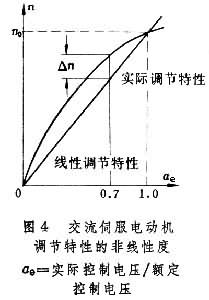
调节特性的非线性度Kr是指在额定的励磁电压和恒定的转矩下,当实际控制电压的百分值αe等于0.7时(图4),实际调节特性与线性调节特性转速差Δn与空载转速 n0之比的百分数,即Kr=Δn/n0×100%。Kr要求小于15~25%。
Km和Kr愈小,电机性能愈接近线性,系统的动态误差就愈小。
 直流伺服电动机
直流伺服电动机
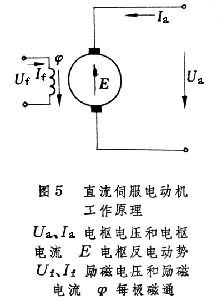
其工作原理(图5)与一般直流电动机相同,电动机转速n为
n=E/K1φ=(Ua-IaRa)/K1φ
式中K1为常数。改变电枢电压Ua或改变磁通φ,均可控制直流伺服电动机的转速,但一般采用控制电枢电压的方法。在永磁式直流伺服电动机中,励磁绕组被永久磁铁所取代,磁通φ 恒定。
直流伺服电动机具有良好的线性调节特性及快速的时间响应。
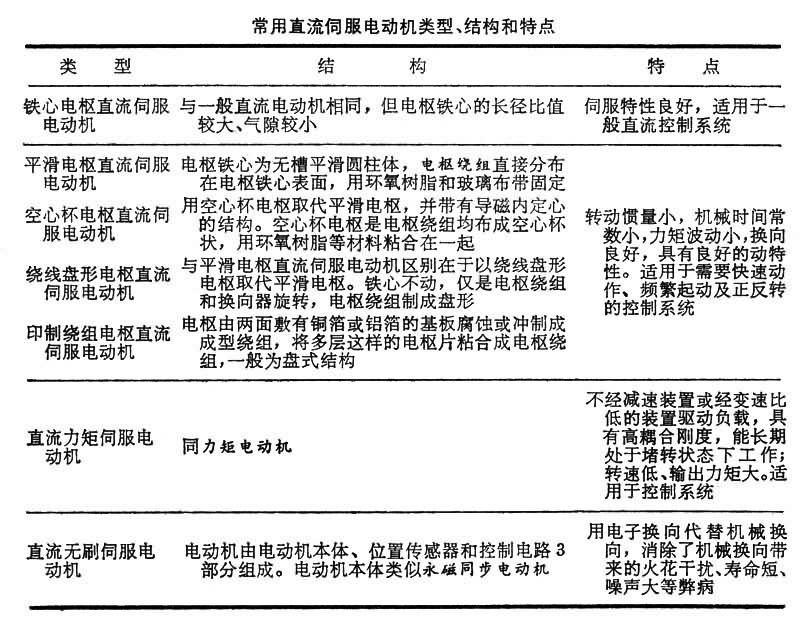
70年代以来,直流伺服电动机应用非常广泛,常用的类型、结构及特点如表。