[拼音]:xianxing tiaojieqi
[外文]:linear regulator
用于控制线性对象的调节器,它使系统状态和控制变量在控制过程中的给定二次型时间积分达到最小值,又称线性最优调节器。线性调节器的反馈规律也是线性的。它与被控对象一起构成线性二次型最优调节系统。求解线性调节器的调节(反馈)规律称为线性调节器问题,已有一套完整的设计方法。线性调节器有较大的稳定裕度、并对系统模型的误差有较强的鲁棒性,广泛用于生产过程的控制。
线性调节器问题的特点是:
(1)被控对象的状态方程是线性的(可以是定常的或时变的):

式中x(t)为状态向量,u(t)为控制向量,A和B是由被控对象的结构和参数所决定的系数矩阵(见状态空间法)。
(2)对控制向量u(t)无约束。
(3)性能指标是二次型形式:
 +uT(t)Ru(t)]dt
+uT(t)Ru(t)]dt
式中τ是控制作用结束时刻,s和Q是半正定对称矩阵,R是正定对称矩阵,上标 T表示矩阵的转置。按照设计要求,可对这些加权矩阵作不同的选择,以适应不同的要求。在性能指标式中,第一项是终点指标,它表示控制过程结束时被控对象偏离平衡状态的程度;第二项是过程指标,它表示在控制过程中被控对象偏离平衡状态的程度和各个控制变量所付出的代价。线性调节器问题可用变分法、极大值原理或动态规划来求解。
线性调节器可以分为有限时间调节器和无限时间调节器两类。
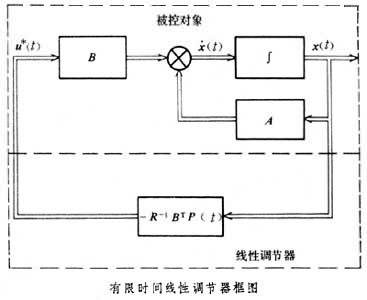
有限时间调节器指控制过程结束时间 τ为有限值时的线性调节器。它的调节规律的表达式为
u*(t)=-R-1BTP(t)x(t)
式中R-1为逆矩阵,而 P(t)可由求解如下形式的黎卡提矩阵微分方程来确定:

有限时间调节器作用相当于一个线性状态反馈。其特点是不管被控对象是时变的还是定常的,调节器必定是时变的。下图为有限时间线性调节器和整个最优调节系统的框图。
 无限时间调节器
无限时间调节器
控制作用结束时间 τ为无穷大时的线性调节器。只有在被控对象为完全能控(见能控性)的条件下,无限时间调节器才能使系统的偏离运动最终回复到原平衡状态。这类调节器问题的性能指标中的第一项必定是零,因此常可将其删去。无限时间调节器的调节规律的表达式是
u*(t)=-R-1BTPx(t)
式中P由求解下列黎卡提矩阵代数方程来定出:
PA+ATP-PBR-1BTP+Q=0
无限时间调节器也是由线性状态反馈构成的。与有限时间调节器不同,无限时间调节器当被控对象为定常时也一定是定常的。