[拼音]:weite dianji
[外文]:small and special electrical machine
基于电磁感应原理、输出功率在数百瓦以内的,或具有特殊功能及特殊使用条件、能转换或传送机电信号或能量的机电型元件。它可用来实现检测、解算、执行和放大功能,也可用作带动机械或电子设备的交、直流电源。在实际使用中,微特电机虽仍具有电机的特点,但它与电子电路如此紧密结合,实际上已成为一类区别于普通电机的电子元件。
1914年在巴拿马运河上即已采用自整角机系统控制水闸。1949年美国国防部军械局颁布第一个自整角机技术条件之后,开始统一自整角机的机座号和外形尺寸。该机座尺寸也适用于其他微特电机。60年代初以来,为适应计算机和自动控制技术迅速发展的需要,又出现不少新门类,如步进电动机、多极角度传感器、无刷直流永磁电动机和直线电机等。现代微特电机已普遍应用于工农业生产、国防建设,以至日常生活中。
微特电机是根据电磁感应和电磁力定律,将输入的机电信号或能量,经过磁场的作用传递到副边,成为另一种形式的输出。微特电机虽具有电机的特点,但它已与电子电路密切结合;而且其设计、工艺、制造及测试还涉及电子、电工、机械及自动控制等领域。
主要性能参数
各类微特电机的性能参数差别较大。一般用作驱动机械时,着重考虑运行和起动时的力能指标;用作电源时,考虑其输出容量、波形和稳定性;用作控制时,则着重于动态性能参数。
微特电机的工作特性有静态特性和动态特性两类。如输出电压与转角、输出电压与转速、转速与转矩之间的关系均属于静态特性。输出电压的幅值或相位与频率的关系则属于动态特性。
灵敏度
微特电机的灵敏度对应于单位输入信号的输出量大小,分别用放大系数、起动电压、比力矩、比电势和时间常数等指标表征。
精度
用误差值表征,即在一定输入条件下,输出电压、转角、转速或转矩的实际值和理论值的差值或差值的比值。各类微特电机的精度实际上是用其主要误差表示的,如自整角变压器用电气误差表示,测速发电机用幅值误差表示。
阻抗
在系统中,微特电机的输入和输出阻抗应分别与其前后级电路相匹配,以保证系统的性能参数和精度。
分类
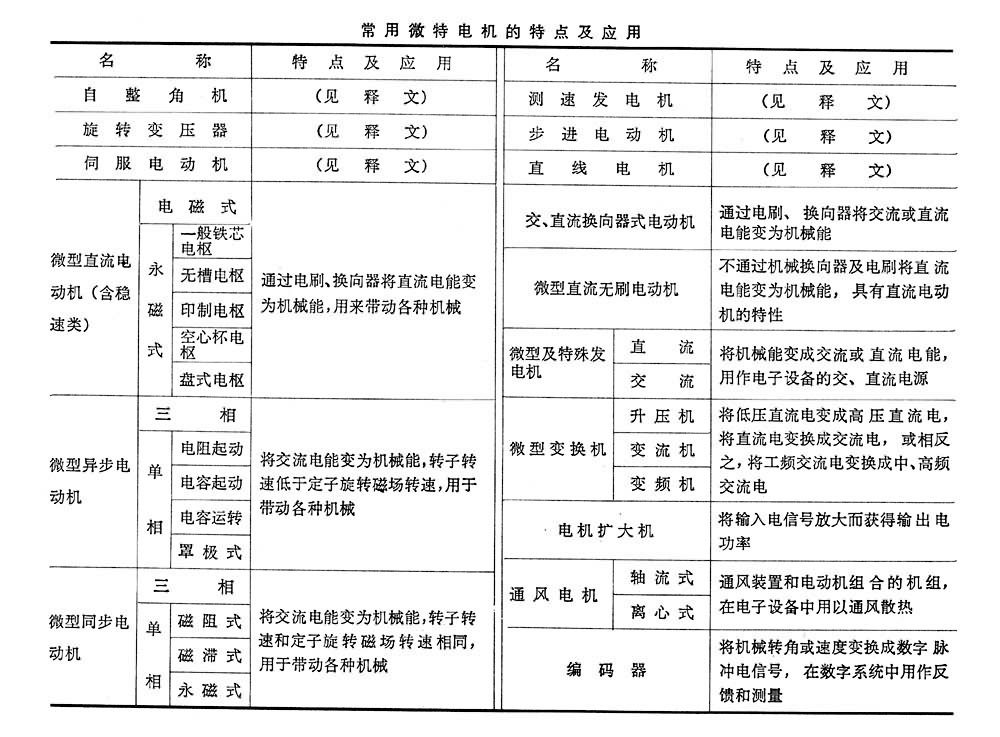
微特电机的种类繁多。表中列有常用的微特电机的特点和用途。图1为各种微特电机的外形。
自整角机
电感式角位移传感元件,用作传递或检测若干个机械上独立的转角,又称自同步机。
自整角机和线绕式异步电机相似,转子转动时绕组间的耦合程度发生变化,感生出信号或产生力矩。由于自整角机要求高精度、高可靠及动态特性好,因而必需选用优质材料,进行精密加工。
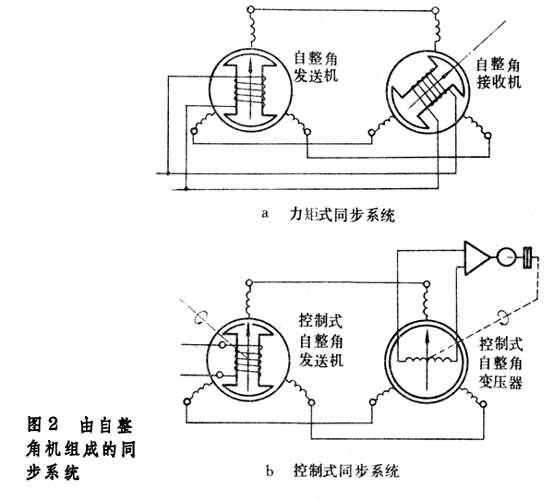
自整角机可分为力矩式、控制式和差动式三类。按功能又分为发送和接收两种。自整角发送机输出与输入转角对应的电信号,它既可是力矩式又可是控制式。自整角接收机接收电信号后,输出相应的转角或电信号。输出转角的称为力矩式自整角接收机,组成力矩式同步系统;输出电信号的称为控制式自整角变压器,组成控制式同步系统(图2)。当要求完成两个角度的和或差的传递和检测时,则应采用差动式自整角机。
旋转变压器
和自整角机相似的元件,但只能输出电信号。信号的幅值与转子转角成正弦、余弦、线性或特种函数关系。此外,还有电感式电位器和电感式移相器,前者的功能与普通电位器类似,后者输出的幅值恒定,而相位与转角成正比。
为了提高系统精度,往往将旋转变压器或自整角机组成粗精两个(或多个)通道的双速(或多速)系统,有机械和电气两种型式。前者用两对精度等级相同的电机分别组成粗精通道,其间用机械升速方法联结;后者则分别采用两对电机用电气方法升速。粗机一般为二极式结构,精机则是多极式。极对数越多,精度越高。现代,最多的极对数为128,元件精度可达2角秒。感应同步器是特殊结构的多极元件,极对数更多,精度更高,但输出信号却很小。
伺服电动机
在系统中作为执行元件,又称执行电动机,分交流和直流两类。
交流伺服电动机是一种特殊的二相异步电动机。定子上有正交的两相绕组,一相接到激磁电源,另一相输入控制信号。转子有鼠笼式、非磁性空心杯或磁性杯等形式。一有控制信号作用,转子立即转动,其转速正比于信号的大小。一旦信号除去,转子立即停转。
直流伺服电动机多半用永磁定子激磁,控制信号加在电枢上。电枢绕组除一般铁芯绕组外,还有印制、空心杯、盘式等无铁芯绕组和无槽电枢绕组,用以改善动态和静态特性。此外,还可用电子电路取代机械换向器,构成无刷直流电动机。
测速发电机
输出与转速成正比的器件,又称速度传感器,有交、直流两种。直流测速发电机的结构和直流伺服电动机相近,具有较高精度。交流测速发电机大多用空心杯转子;定子为两相,一相激磁,另一相输出频率不变的交流电压。
多极形式的伺服电动机和测速发电机分别称为力矩电动机和低速测速发电机。它们一般用来输出低速大转矩,直接带动机械负载,并可在旋转状态下长期工作。最大转矩已高达1400千克米;最低转速低到每天一转以下,电机外径达26米。
步进电动机
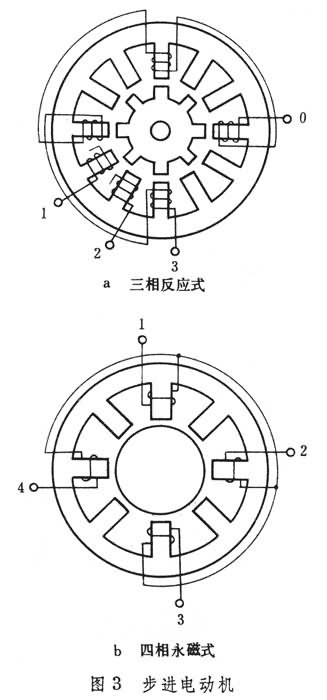
用脉冲信号控制转子转动的电动机,也称脉冲电动机。常见的有反应式和永磁式两种。图 3是三相反应式步进电动机及四相永磁式步进电动机的原理图。每加一个控制脉冲信号,定子绕组的通电状态改变一次(图中绕组1通电改为绕组2通电),转子就转过一个步矩角。反应式和永磁式两者的运行性能不同,相对说来,后者的步矩角大,有定位转矩,运行频率低,阻尼性能好,功耗小等特点。感应子式步进电动机兼有反应式和永磁式的特点,即步矩角较小、运行频率较高,有定位转矩,阻尼性能好等。
步进电动机适用于数字控制系统,可以构成简单的开环系统,有较高的定位精度,而且结构简单、运行可靠、成本较低,因而应用很广。它的缺点是起动转矩较小,带动惯性负载的能力较差。
直线电机
在许多场合下要求负载作直线运动,若仍用旋转式电机,则传动机构复杂、性能差,因此需用直线电机直接带动。直线电机在电子设备中用得很多。按其功能有电动机和传感器两类,而后者又分速度传感器和位移传感器两种。
直线电动机按功能分有控制用和带动机械用两种。直线步进电动机和直线直流电动机应用较多。在结构上它们相当于将旋转电机沿电枢周围展开成直线;用于磁盘驱动的音圈式直线电机的结构则和扬声器相似。通过定子和动子的电磁作用,沿直线方向产生推力,由此带动机械或控制负载的运动。
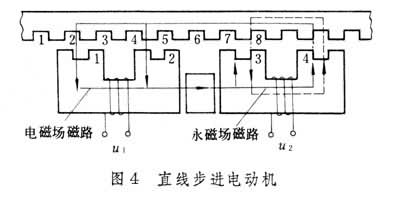
两个直线步进电动机合在一起便构成平面步进电动机,可以得到二维运动。图4为平面永磁式步进电动机中一个方向的电机示意图。直线速度传感器又称直线测速发电机,用来检测直线运动速度。通常,其动子用永磁体,输出电信号的线圈置于定子上。
直线位移传感器可以利用差动式变压器原理实现信号的输出,也可类似正、余弦旋转变压器,做成直线感应同步器。
为了使用方便,往往将上述两个或两个以上的元件机械地组合成机组。一般有机械和电磁两种组合形式。如伺服-测速机组、力矩-自整角机组等,是在同一机壳内的公用转轴上机械地组装成一体;而电磁组合形式则是两个电机共用同一个磁路的结构。
- 参考书目
- 上海微电机研究所编著:《微特电机》,上海科学技术出版社,上海,1983。
- S.A.Davis and B.K.Ledgerwood, Electromechanical Components for Servomechanisms, McGraw-Hill, New York,1961.